Модуль подводного ультразвукового дальномера. Часть третья

Самыми значимыми изменениями в проекте, по сравнению с предыдущими версиями сонара (один и два), являются упрощение аналоговой части и эволюция процесса сборки модулей в сторону большей технологичности. Испытаны разные комбинации адгезивов и компаундов для герметизации платы и излучателя внутри корпуса.
Ну и то, что теперь это коммерческий продукт, доведённый до стадии производства.
Производство
Знатно намучившись с очень неудобным Временны́м Регулятором Усиления, не решавшим проблему узкого динамического диапазона, принято решение использовать интегральный логарифмический усилитель. Господи (если ты есть), спасибо тебе и парням из Analog Devices за это чудо! Треть всего функционала сонара, без преувеличения, — это он. Обратная связь? Клиппинг? Самовозбуждение? Не, не слышал. Наш ответ — AD8310!
Предыдущий вариант тоже рабочий, но с минусами. Во-первых, два каскада активных очень узкополосных фильтров сложно настраивать. Во-вторых, схема регулировки усиления — ею нужно управлять. В-третьих, каскад амплитудного детектирования нелинеен ближе к границам своего динамического диапазона. У последних двух пунктов характеристики, отчасти, зависят от температуры и разброса параметров ключевых компонентов. Так мы пришли к логарифмическому усилителю. Новый аналоговый тракт обладаем существенным преимуществом — это измерительный прибор с логарифмической шкалой. Это позволяет делать захват всего доступного динамического диапазона (95 дБ) обычным 12 битным АЦП с высокой верностью, а регулировка усиления может быть произведена в пост-обработке на стороне ПО.
Что касается изменений в технологии изготовления. Основное – это решение проблем адгезии.
Вопрос адгезии материалов между собой очень важен, поскольку именно этим свойством, в основном, обеспечивается защита от протечек. Внутренности модуля заливаются компаундом и самое слабое место – это примыкание оболочки кабеля к заливочному компаунду, на который возложена главная обязанность по противостоянию давлению и герметизации схемы. Этот компаунд обязан иметь высокую прочность и хорошую адгезию к компонентам. Дело в том, что внутри кабеля присутствует воздух, который сжимается под давлением, заставляя внешнюю оболочку отрываться от окружающего его компаунда. Решений этой проблемы несколько. Главным действием в нашем случае было использование кабеля в полиуретановой оболочке Helukabel DataPUR-C. У него наилучшая адгезия к выбранному компаунду из множества протестированных нами кабелей. Та часть кабеля, которая заходит в корпус и заливается компаундом, дополнительно обрабатывается плазмой для ещё большего сцепления с компаундом.
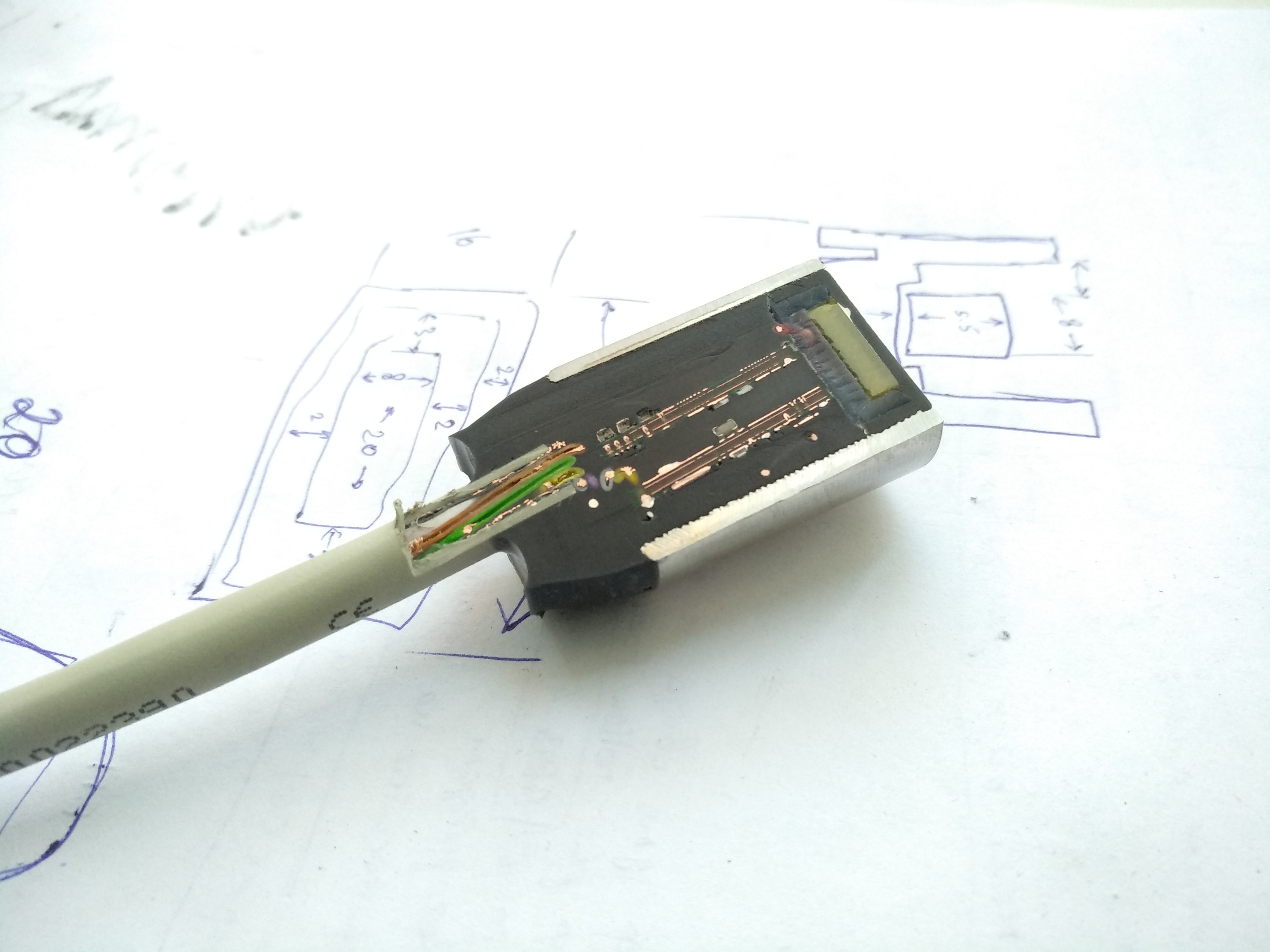
Модуль в разрезе:
Некоторый баттхёрт доставила история с RoHS. Если кратко, то RoHS – это правила Евросоюза, регламентирующие содержание опасных веществ в продукции (Свинец, ртуть, кадмий и прочая бяка). А поскольку изначально мы были нацелены на экспорт, приоритет в выборе комплектующих был отдан тем, которые имели сертификаты/декларации соответствия RoHS. Поэтому, кстати, российские комплектующие и не рассматривались. Исключение составила только, свинцовая пьезокерамика, используемая в качестве электроакустического преобразователя в сонаре. Эти материалы выведены из-под регулирования RoHS, как и любая керамика со свинцом в связанном виде (2011/65/EN Exemption 7©-I).
Получив опыт экспорта небольших партий за рубеж, до сих пор не понятен смысл постоянного применения Экспортного Контроля к нашей продукции.
Суть в том, что для некоторых категорий товаров используется разрешительный порядок экспортных операций. Это могут быть товары, применение которых возможно не только в гражданской, но и в военной сфере. Например, защищённая ЭВМ. Или болометрическая матрица. Или сонар, как в нашем случае. Чтобы получить разрешение на экспорт, в первую очередь, товар не должен обладать выдающимися характеристиками. Касательно сонаров – это, например, свойства направленности.
Характеристики нашего продукта, по сравнению с приведёнными в списке ограничений (угловое разрешение 12° против 0,5°), это как поделка первоклассника по сравнению с выпускной работой отличника аспирантуры. Но неудобство создаёт то, что, для отправки сонара новым покупателям (даже физ. лицам) за пределы нашей страны, процедуру Экспортного контроля необходимо проходить каждый раз, несмотря на то, что экспертами уже ранее было подтверждено неприменимость ограничений на вывоз в отношении нашего товара.
Стоимость этой процедуры составляет от 10 тысяч рублей, что ставит крест на привычной интернет-торговле с остальным миром.
Справедливости ради, стоит отметить, что проверяется не только свойства товара, но и причастность покупателя к запрещённым организациям.
Это не только особенность российских таможенных правил, многие страны имеют договорённости по экспортному контролю товаров двойного назначения.
Из нержавеющей стали выполнен корпус сонара, выполняющий также роль экрана для внутренней схемы. Иметь прямого гальванического контакта с элементами схемы он не должен, поэтому соединён с «землёй» через керамический конденсатор, приваренный к корпусу с помощью точечной сварки.
Все отправляемые модули проходят тестирование давлением. Несмотря на заявленную рабочую глубину 100 метров, проверочное давление – 35 Атмосфер (эквивалент почти 350 метров). Как говорится, лучше перебдеть…
Сама установка проверки давлением до предела проста. Источник давления – опрессовщик систем отопления с манометром. Барокамера – отрезок качественной полипропиленовой трубы, с одной стороны которой – штуцер, соединяющий шланг опрессовщика, а с другой – крышка с отверстием и уплотнителем для кабеля испытываемого модуля.
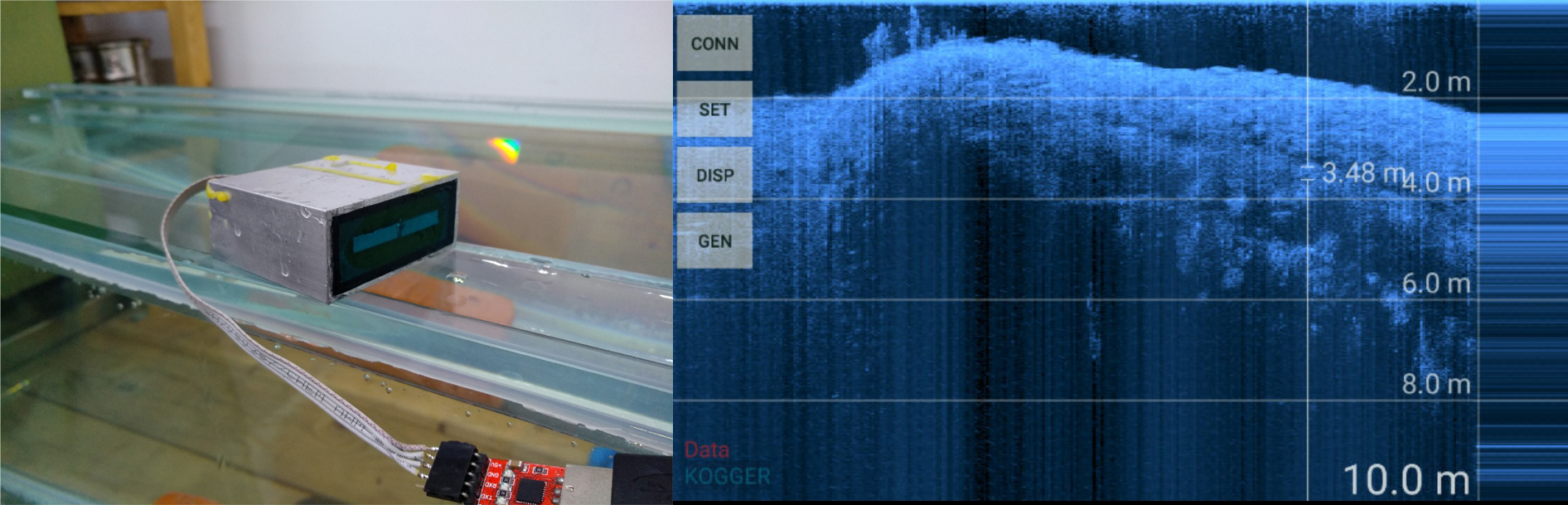
Один из ключевых параметров – диаграмма направленности. В качестве измерительного стенда использовалась конструкция следующего вида:
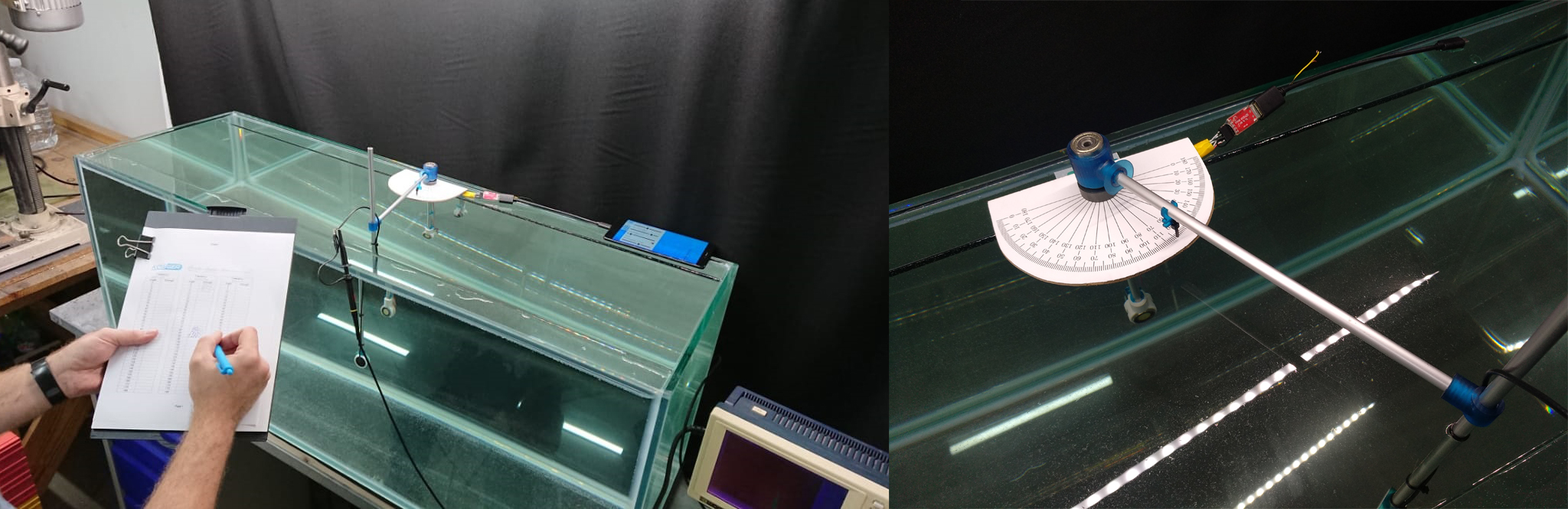
Сонар закреплён в аквариуме стационарно. Подвижная принимаемая антенна расположена на одном уровне с излучателем сонара и имеет возможность поворачиваться в пределах 180° в плоскости перпендикулярной плоскости излучателя. Таким образом мы имеем возможность измерить амплитуду принимаемого акустического сигнала в зависимости от направления приёмника относительно излучателя сонара. Один из выводов сонара был настроен на выход синхроимпульса для осциллографа, чтоб можно было однозначно отличить прямой сигнал сонара от отражённых. Измерения показали угол 12° до уровня половины от максимальной амплитуды принимаемого акустического сигнала.
График на основании полученных данных:

Опыт использования
Наивно полагая, что, бесплатно отправив образцы сонаров тестерам, мы можем получить качественную обратную связь, мы потеряли время и не получили значимых результатов тестирования. Есть ощущение, что у тестеров было бы больше мотивации разобраться с устройством, заплати они хоть 50% стоимости.
Всё-таки, качественная обратная связь – это когда ты сам становишься пользователем своего продукта.
Здесь мы плавно переходим к одному из возможных применений нашего сонара.
До подводных роботов нам пока далеко, но лодку – автопилот для батиметрии мы собрали самостоятельно.
В качестве контроллера автопилота был выбран PixHawk (ПО — ArduPilot).
Лодка движется по предварительно сформированному маршруту. Данные сонара о расстоянии до дна записываются автопилотом на карту памяти вместе с данными с GPS приёмника. Совмещая эти данные возможно составить карту дна водоёма.
В общем виде, схема подключения выглядит следующим образом:

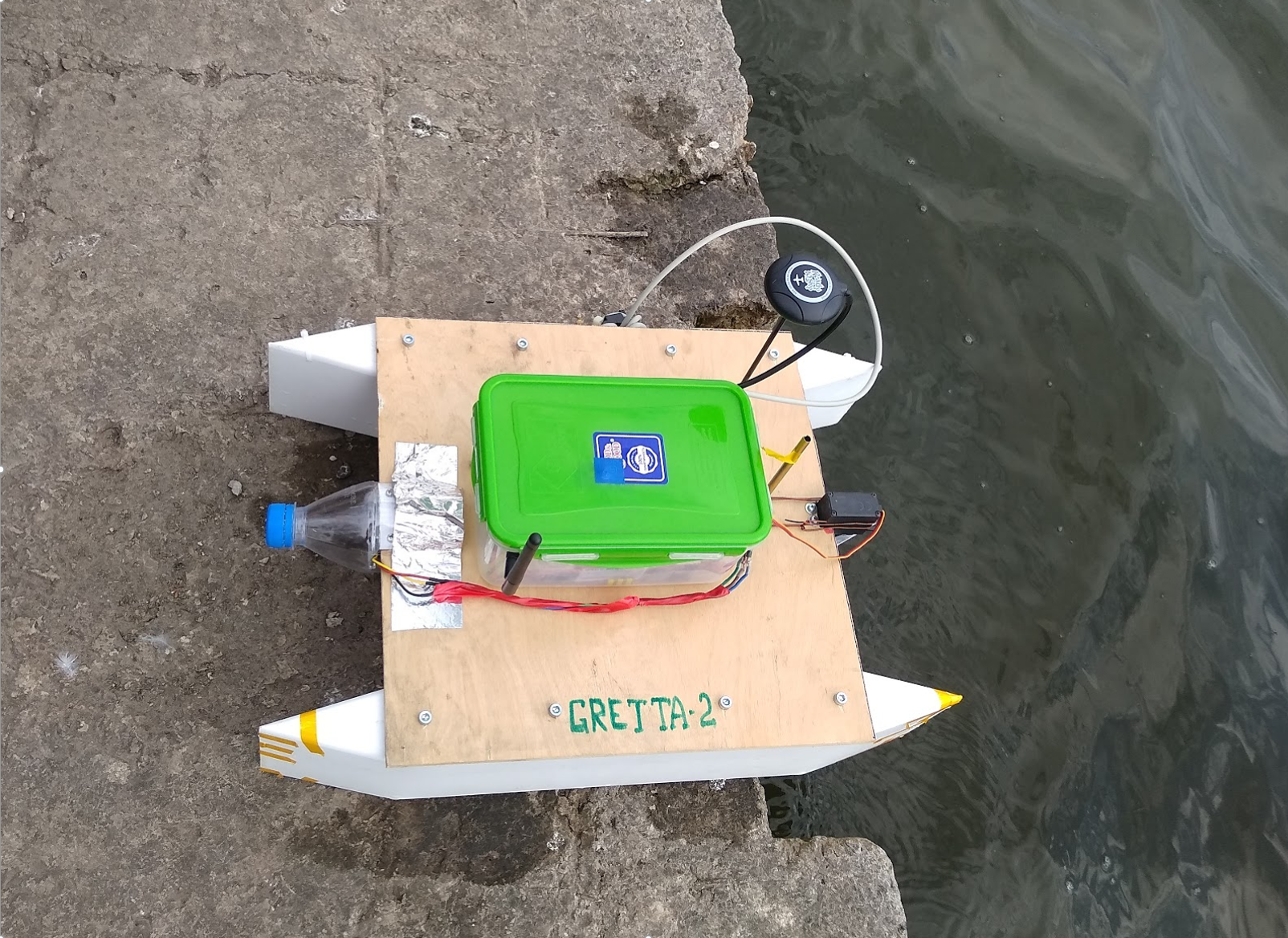
А это — научное исследовательское судно Gretta-2 c установленным оборудованием:
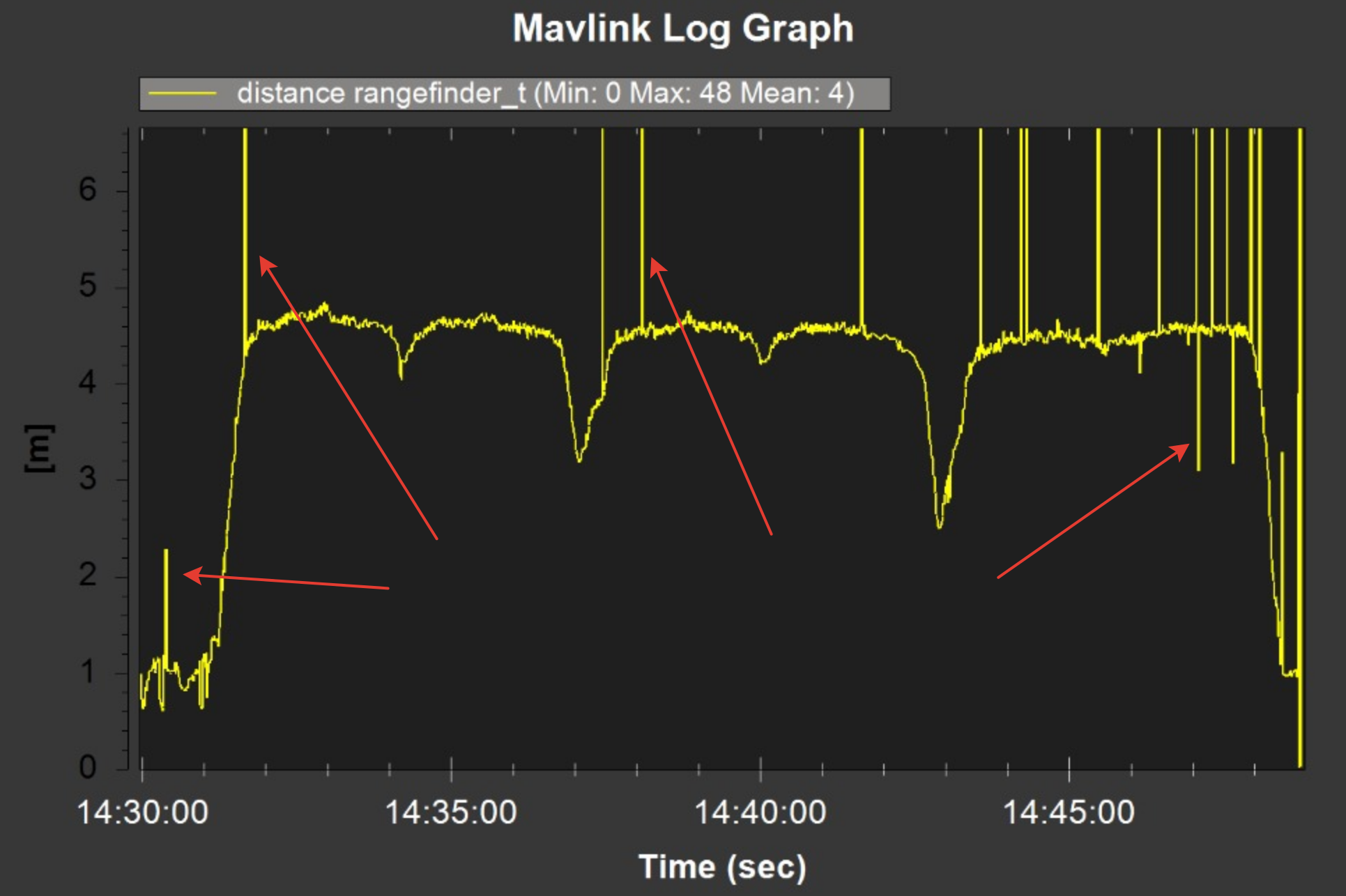
В день тестирования дул сильный ветер, и нашу лоханку прилично колбасило, вследствие чего сонар периодически хватал воздух, что сказывалось на показаниях. На картинке ниже указаны эти аномальные пики на графике измеренной глубины. Так что, желающим повторить подобную конструкцию, следует уделить этому нюансу некоторое внимание.
Испытания в более удачный день позволили получить более точные данные, благодаря которым была построена карта дна небольшой части местного водоёма:

Кстати, в модуле реализовано два типа протокола: бинарный, и текстовый NMEA. Последний поддерживается платформой ArduPilot, поэтому со стыковкой сонара и контроллера автопилота проблем не возникает.
Информацию о том, как предварительно настроить наш сонар для работы в связке с ArduPilot можно посмотреть здесь.
Чтобы проводить опыты с сонаром, не обязательно иметь сложное внешнее оборудование, или обладать продвинутыми навыками программирования. Достаточно иметь Android-смартфон с предустановленным нашим GUI, любой конвертер USB->UART и кабель OTG. Можно менять такие параметры, как частоту излучения, количество импульсов в пачке, период генерации зондирующих импульсов, и много чего ещё. Результат изменения этих параметров сразу виден на экране.
Если смартфон имеет модуль GPS, то можно вести запись данных сонара и данных с GPS самого смартфона.
Изменив излучатель с диска на продолговатый параллелепипед, можно из узколучевого сонара получить некое подобие ГБО — гидролокатора бокового обзора. На минималках, конечно.
Хоть небольшая мощность и ультракомпактные размеры не позволят светить на десятки метров, но этого достаточно, чтобы ознакомиться с принципами работы ГБО, поиграться с настройками и мгновенно видеть результат изменения этих настроек.
ГБО на минималках:
Отдельно хотелось бы остановиться на GUI.
Вместе с тем, что он умеет менять параметры работы сонара, писать логи вместе с координатами, отправлять данные на удалённый сервер (фича в разработке), это ещё и опен-сорсный проект, написанный на Java в среде Android Studio. Тем, кто занимается мобильной разработкой и коммуникацией приложения с внешними устройствами, возможно, решения, которые реализованы в нашем приложении, будут полезны.
Ещё бы добавил, что сонар, помимо интерфейса UART, имеет несколько дополнительных дискретны входов/выходов, которые можно использовать, например, для синхронизации массива сонаров и построения подобия локатора с синтетической апертурой. Но это уже совсем другая история…
У нас же есть встроенный MEMS IMU.
Одновременно с данными об отражениях от объектов, можно получить информацию о направлении, откуда получены эти данные. Такое решение не уникально и существуют готовые сонары сканирующего типа, только ценник начинается от $2k. Если хочется сэкономить, то можно воспользоваться комбинацией бюджетного сонара (как наш) с собственной установкой для поворота.
Вот такие результаты для связки сонара и обычной руки, хаотически двигаемой в направлении исследуемого объекта, можно получить, прибегнув к методам интерполяции (плафон светильника на дне метровой бадьи):
Как выбрать датчик эхолота?

Если вы выбираете эхолот для рыбалки с лодки, «что-нибудь универсальное», и не планируете покорять большие глубины – уделите внимание параметрам датчика эхолота (трансдьюсера). Именно датчик определяет, что вы в итоге увидите на экране.
Как выбирать основные параметры трансдьюсера – рабочие частоты, доступные функционал, тип корпуса – мы разберем ниже.
Частоты датчика
Частоты эхолота – самый важный параметр и первый, на который вам нужно обратить внимание при выборе эхолота. Современные эхолоты работают в диапазоне 50-800 кГц. При этом диапазон 50-200 кГц относят к низким частотам, а 400-800 кГц — к высокочувствительным, высокочастотным лучам.
Вопреки распространенному мифу, нет специальных датчиков для пресной и морской воды. Другое дело, что «пробивание» (глубина проникновения сигнала эхолота в толще воды) в соленой воде ощутимо ниже, чем в пресной, из-за большей плотности и солености. Условно, если датчик видит в речной воде на 10 м в глубину, то в соленой увидит на 5 метров, в зависимости от солености водоема.
 На этом параметре уже можно заметно сэкономить. Если вы выходите в море на глубину максимум 50 метров, вам будет достаточно купить датчик эхолота с максимальной глубиной 300 м. Не стоит, как многие, покупать эхолот с пробивной способностью до километра в пресной воде «про запас».
На этом параметре уже можно заметно сэкономить. Если вы выходите в море на глубину максимум 50 метров, вам будет достаточно купить датчик эхолота с максимальной глубиной 300 м. Не стоит, как многие, покупать эхолот с пробивной способностью до километра в пресной воде «про запас».
Эхолот эффективно работает на частотах 50-200 кГц, отображая рельеф дна, и отмечая найденные объекты галочками или «рыбками». Вместе с данными температуры, датчик которой сейчас есть практически в каждой модели трансдьюсера, вы получите полноценную картину происходящего под водой, чтобы не сесть на камень, выбрать хорошее место и удачно порыбачить.
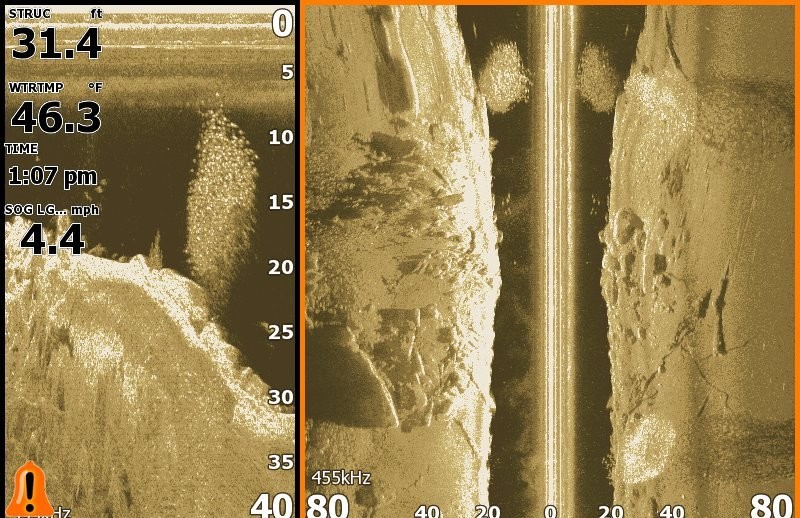
Высокочувствительные лучи – 400-800 кГц – позволяют увидеть силуэты объектов под водой, мелкие детали рельефа, подробную структуру дна. Между тем, высокая частота сканирования создает некоторые сложности: во-первых, пробивная сила у высокочастотных лучей заметно меньше, во-вторых, работают они только в движении.
Луч с частотой 800 кГц бьет в пресной воде на глубину максимум на 26 метров, в соленой, соответственно, не глубже 17. Луч 455 кГц показывает большую пробиваемость – до 96 метров в пресной воде. Этого уже достаточно для хорошей рыбалки.
При работе с высокочастотным датчиком эхолота вы должны двигаться со скоростью не менее 3 кмч, оптимально – до 16 кмч. Распространено мнение, что высокочувствительные лучи будут нормально работать на скорости до 80 кмч На самом деле это маркетинговая уловка. Сравните с собственным зрением — когда вы едете на автомобиле, вы просто не успеваете разглядеть каждую травинку, точно также происходит и с эхолотом.
Эхограмма диапазона 400-800 кГц наглядно демонстрирует структуру дна за счет цветной градации, таким образом, лучше подключать подобный датчик к цветному дисплею.
Современные эхолоты позволяют накладывать схематичное изображение низких частот на цветную диаграмму высокочастотного луча, создавая объемную, максимально четкую картину. По отзывам рыбаков, диапазон 400-800 кГц полезен для поиска конкретного вида рыбы: размеры и даже породу можно определить по форме силуэта.
Установка датчика эхолота
Датчики эхолота по способу установки делятся на:
- транцевые – закрепляемые на транце лодки, в том числе с помощью струбцины;
- врезные – устанавливающиеся в подготовленное отверстие в корпусе лодке;
- вклеиваемые – закрепляющиеся на днище лодки изнутри и сканирующие «сквозь корпус».
Последние удобны тем, что не требуют ни дополнительных креплений, ни подъема лодки для установки. Однако отсутствие контакта с водой и наличие помехи в виде судового корпуса сказываются на качестве сканирования и точности измерений.
При установке врезного трансдьюсера важно учитывать килеватость корпуса (угол поперечного профиля). Сейчас в России ввозят датчики с разным параметром килеватости, чаще – нулевые, то есть устанавливаемые точно в киле, которые умельцы легко приспосабливают под выбранное место установки.
Если датчик выходит из воды, он теряет контакт со средой, искажаются данные сканирования. Струбцина для датчика эхолота должна быть такой длины, чтобы транцевый трансдьюсер всегда оставался в воде – даже если судно приподнимается на волне.
Как правильно установить датчик эхолота?
Рекомендуем устанавливать датчик эхолота на 10 см ниже поверхности воды – это мера позволит сохранить точность эхограммы при волнении ценой небольшой потери точности в измерении глубины.
Если вы подключаете несколько датчиков к одному дисплею, что особенно актуально для профессиональных моделей, обратите внимание, что датчики начинают глушить друг друга, если между ними расстояние меньше 30 см.
Кроме того, помехи эхолоту создают вибрация и пузыри от мотора, как и пузыри кавитации вдоль корпуса. Рекомендуем тщательно выбирать место установки, по возможности тестируя каждый вариант.
Чаще всего наши покупатели предпочитают вариант съемной струбцины для датчика эхолота – установка на транце оптимальна для большинства моделей, в том числе для надувных лодок.
Корпус датчика эхолота
Датчики эхолота бывают бронзовые и пластиковые. Важно при врезке датчика заподлицо учитывать материал его корпуса, чтобы предотвратить возможную коррозию. Впрочем, мы регулярно сталкиваемся с тем, что сочетаемость материалов корпуса и датчика совершенно не учитывается. Важно обратиться к хорошему мастеру.
Эхолот для зимней рыбалки
Особенность датчиков эхолота для зимней рыбалки – в удобной форме корпуса и способности сканировать сквозь лед. Однако у таких моделей есть ряд недостатков.
Во-первых, зимний датчик никогда не покажет рыбу, которая неподвижно «спит» у дна, а значит, вы пропустите заметную часть улова.
Во-вторых, пробиваемость через лед даже у таких специализированных датчиков невелика – максимум 30 см. Соответственно, для нормального обзора лучше провертеть лунку и опустить трансдьюсер прямо в воду, тогда он покажет нормальную картинку с небольшой погрешностью в измерении глубины.
Ключевое достоинство зимних датчиков – удобный корпус-«колокольчик». Обычные датчики, рассчитанные, например, на транцевое крепление, могут использоваться зимой, но их приходится дополнительно фиксировать. Все датчики эхолота изготавливаются из морозостойкого пластика или бронзы. Более того, обычный судовой датчик сонара зимой будет даже удобнее – поскольку покажет лучшую картинку, выделит термоклин, рельеф дна, отследит рыбу.
Обратите внимание, что зимой имеет смысл использовать датчики обычного диапазона – 50-200 кГц. Высокие частоты, как мы писали выше, бесполезны, если вы стоите неподвижно.
Оптимальный выбор эхолота
Можно сделать вывод, что оптимальный «универсальный» прибор – это пластиковый транцевый двухлучевой черно-белый эхолот, работающий в диапазоне 83-200 кГц. Такого прибора будет более чем достаточно, если вы выходите в акваторию на глубины не более 150 м. Средняя стоимость прибора – до 15 000 рублей.
В последнее время все производители выпускают «гибридные» модели датчиков, работающие во всем доступном диапазоне частот, поэтому наши покупатели, особенно любители троллинга, покупают четырехлучевые «гибридные» эхолоты с цветным экраном, получая и подробную эхограмму высокочувствительных лучей, и эффективную работу обычной эхолокации. Эхолот с 4хчастотным датчиком будет стоить около 20 тысяч.
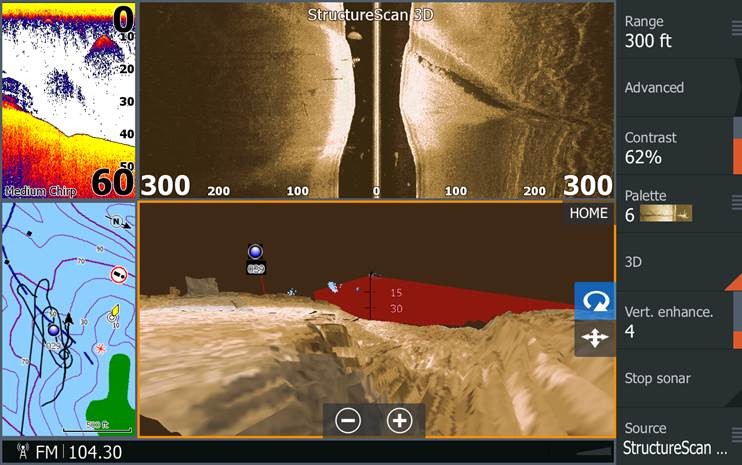
Современные технологии значительно расширили возможности судового эхолота. К примеру, появилась возможность бокового сканирования, впередсмотрящие эхолоты, 3D-датчики.
Боковое сканирование позволяет эхолоту сформировать более развернутую картинку происходящего на дне. Дальность бокового сканирования также достаточно велика. Условно, если эхолот пробивает на 10 метров в глубину, то в сторону – на все 20 м. Качество картинки при этом не страдает.
Впередсмотрящие эхолоты, например модели Simrad Forwardscan, используются в качестве навигационного оборудования и позволяют осматривать рельеф дна и пространство перед судном, избегая мелей и помех. Однако из-за ширины луча такой эхолот чувствителен к глубине, и на мелководье он практически ничего не «видит».

3D-датчики, к примеру, StructureScan, формируют на основе данных эхолота полноценную трехмерную картинку с возможностью разворота на 180 градусов. На сегодняшний день это самый совершенный способ исследования происходящего под водой.
Абсолютно все эхолоты чувствительны к скорости передвижения – это обусловлено физической природой эхолокации. Оптимальная скорость движения лодки при работе эхолота – 5-8 кмч, максимальная – до 80кмч при работе в обычном диапазоне. При большей скорости прибор просто не успевает собирать результаты сканирования.
Бюджетные линейки у основных производителей:
Garmin – эхолоты Striker, с аббревиатурой DV – укомплектованные 4-хчастотным датчиком.
Lowrance – новые серии эхолотов Hook 4x, 5x, 7x, 9x. Все они комплектуются 4-хчастотным датчиком – или любым другим по вашему желанию.
Raymarine — серия картплоттеров-эхолотов Dragonfly DVS, отличается лучшим качеством изображения.
Также датчики Raymarine CHIRP обладает уникальным функционалом – «плавающей частотой». Эхолот сам выбирает оптимальную частоту для выбранной глубины, чтобы получить максимально качественное изображение. Таким образом, подстройка происходит без участия пользователя. По опыту наших покупателей, эхолоты Raymarine показывают лучшие результаты на больших глубинах – к примеру, позволяют различить хищника на глубине до 500 метров.