- Эхолот, теория и практика эхолокации
- Датчики и углы обзора эхолота
- Что отображает эхолот на экране
- Дополнительные функции эхолотов
- Советы по использованию эхолотов с боковым обзором
- Первый шаг — правильная установка
- 1. Навесной транец лодочного мотора
- Под навесным транцем
- 2. Выступ на транце
- 3-4. Транец
- 5. Троллинговый мотор
- Правильное подключение к источнику питания
- Место установки антенны GPS-приемника
- Второй шаг – используйте настройки по умолчанию, сканируйте известные объекты
- Третий шаг – использование записи лога сонара
- Частоты сканирования 455 и 800кГц
- Цветовые палитры
- Просмотр сигнала только с одной стороны от лодки
- Резюме
Эхолот, теория и практика эхолокации
Если цену и технические навороты эхолота оставить в стороне, то механизм работы данного устройства выглядит так. Сначала формируется электрический импульс в блоке управления, далее импульс передается на датчик. Затем происходит преобразование электрического импульса в ультразвуковую волну, угол направления которой перпендикулярен поверхности воды. Волна проходит сквозь воду, достигает дна, отражается от него и возвращается назад. В конечном итоге ультразвуковая волна преобразуется назад в электрический импульс и обрабатывается блоком управления. Если на пути волны до дна встретились какие либо препятствия (рыбы, водоросли и т.п.) то информация о них также будет включена в итоговый сигнал, который получит датчик. После обработки сигнала блоком информация выводиться на экран справа в виде столбца. Последовательность таких сигналов и формирует изображение, которое перемещается по экрану справа налево.
Важным моментом в работе любого эхолота является скорость перемещения лодки, при которой он будет корректно отображать ситуацию под водой. Излучатель эхолота не отправит следующий импульс, пока не будет получен предыдущий.
Если учесть то, что в наших краях в основном небольшие глубины, где используются бытовые эхолоты, важным фактором становится скорость обработки сигналов процессором эхолота. Модели современных эхолотов работают на скоростях от 10 до 80 км/ч. Если хотите окунуться в расчеты то вот вам данные. Звуковая волна в воде распространяется со скоростью 1500 м/с. Скорость перемещения в лодке и глубину подставляете и получаете нужную цифру. Кроме быстродействия эхолота обязательно нужно смотреть на его дисплей, точнее на разрешение. Высокое разрешение по вертикали позволяет отображать мелкие объекты и поэтому 160 пикселей (или точек) уже вполне хорошее, а если 300 или 320 то такого точно будет достаточно. Разрешение по горизонтали это по сути история сканирования. Если вы используете эхолот на малых скоростях, то вам будет вполне достаточно и 160 пикселей, для больших скоростей лучше купить эхолот с разрешением по горизонтали 320.
Датчики и углы обзора эхолота
Эхолоты могут быть 1, 2, 3, 4 и 6 лучевые. Также бывают и 3D эхолоты (к примеру эхолоты Humminbird). Количество лучей зависит от типа датчика. Основа любого датчика эхолота это искусственный кристалл циркона свинца или титаната бария. Размер и геометрическая форма кристалла и определяют на каких частотах и со сколькими лучами будет работать датчик. Кроме количества лучей обязательно обратите внимание на пиковую и среднюю (RMS) мощность, частоту работы датчика и угол обзора. От части по пиковой мощности можно узнать максимальную глубину эхолокации. Польза от знания средней мощности так же есть. Чем меньше отношение пиковой и средней мощности тем на более больших скоростях сможет работать эхолот.
Современные эхолоты чаще всего используют частоты 50 и 200 кГц. Частота 50 кГц перекочевала в обычные эхолоты от морских судов. У этой частоты большой угол охвата и большая глубина сканирования, но низкое разрешение и плохое определение малых объектов, а также большая чувствительность к помехам. Датчики с 200 кГц предназначены для малых глубин и больших скоростей, они хорошо определяют мелкие объекты и не так чувствительны к помехам, но у них маленькая глубина сканирования и узкий угол охвата (обзора).
В теории звуковая волна, запущенная датчиком, распространяется в воде во все стороны, но ее распространение не является равномерным, т.к. датчик у нас узконаправленный. Мощность сигнала по центральной оси максимальна, чем дальше от этой оси, тем меньше его мощность и совсем на краях сигнал уже невозможно отличить от помех. Угол охвата принято измерять по уровню -10 дБ, т.е. на периферии мощность сигнала в 10 раз меньше чем на центральной оси. Но не стоит думать, что чем больше угол охвата, тем лучше в любом случае. К примеру глубину эхолот определяет по самой высокой точке дна, которая попала в конус луча. И если у 200 кГц датчика с углом 20 градусов на глубине в 10 метров пятно луча будет диаметром 3,5 метра, а у 60-ти градусного 83 кГц пятно будет уже 11,5 метров. Так вот первый может пропустить яму шириной не более 3,5 метров, а второй уже 11,5 метра. Разница ощутима, не правда ли? Небольшой угол охвата у датчика даст более точную картину дна.
Сегодня эхолоты все чаще используются не для сканирования дна, а для поиска рыбы, они так и называются – рыбопоисковые эхолоты (рекомендуем посмотреть эхолоты Lowrance). И для этих целей чаще всего используют двухлучевые датчики. К примеру датчик с частотой 200 кГц и углом 20 гр. сканирует дно, а 83 кГц и 60 гр. занимается поиском рыбы. Центральная ось у обоих лучей одна. На экране рыбы опознанные разными датчика обозначаются по разному. Опознанные узким лучом символы закрашиваются темным, а широким символы прозрачные. Но двухлучевой эхолот не может точно определить положение рыбы, слева она или справа от лодки. С этим справится уже трехлучевой эхолот. Кроме глубины, на котором определилась рыба будет обозначение L или R.
Для более точного определения местоположения рыбы используются четырехлучевые эхолоты. Они отлично подойдут для троллинга (ловли на дорожку). Но в таком эхолоте лучи находятся не на одной оси. Два луча работают как и у двух лучевых эхолотов, а вот два других сканируют под небольшим углом к центральной оси. Частота боковых датчиков обычно 455 гКц, угол 45 градусов. Экран таких эхолотов разделен на три части. В верхней показывается стандартная информация от двухлучевого датчика, а внизу слева и справа данные от высокочастотных боковых датчиков.

Самую полную информацию даст шестилучевой эхолот или 3D эхолот. У него датчик с шестью независимыми излучателями, угол охвата у каждого 16 градусов. Соседние лучи перекрывают друг друга и итоговый угол равен 53 градусов. Такой эхолот максимально точно показывает рельеф дна и расположение рыбы. На экране отрисовывается трехмерная картинка.
Что отображает эхолот на экране
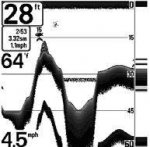
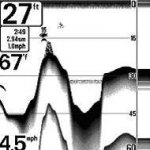
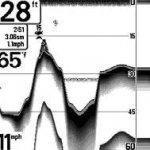
Эхолот это ни в коем случае не телевизор, хотя что то похожее в них есть. Эхолот работает только в движении (смотрим теорию чуть выше). Если лодка стоит на месте и соответственно датчик неподвижен, то на экране вы увидите прямую линию, т.к. сигнал все время будет один и тот же.
Здесь вы видите экран эхолота Humminbird Matrix12. Практически все эхолоты умеют измерять глубину и эти данные они выводят на экран (45 ft-футов). Также у большинства есть встроенный термосенсор в датчик. Температура измеряется в поверхностном слое (56 F по фаренгейту). Если если еще и GPS датчик, то еще вы увидите и скорость своего перемещения (3,1 mph – мили в час). Напряжение питания выводиться внизу по центру (14.0 V). В правом нижнем углу диапазон глубины (60), он выбирается автоматически или вручную. Числа над символами рыб – это на какой глубине они были обнаружены.
Рельеф дна отрисует достаточно точно любой современный эхолот, а вот структуру дна нет. В этом случае все зависит от экрана и мощности эхолота. Для наших глубин большинству эхолотов вполне хватает мощности, а вот с качеством экрана могут быть проблемы. Для более менее нормального отображения структуры дна будет достаточным разрешение в 240 пикселей по вертикали и 4-х оттенках серого. Самым лучшим будет эхолот с цветным экраном. Цветные эхолоты разные структуры дна окрашивают в разные цвета. Но и у ч/б эхолотов есть методы отображения структуры дна.
- White Line – Белой линией на поверхности выделяются самые сильные сигналы, отделяя тем самым придонные структуры от твердого дна.
- Structure ID – Темным отрисовываются сильные отраженные сигналы, слабые светлым оттенком.
- Inverse – Сильные сигналы наоборот показаны светлым. Помогает определить именно слабые сигналы.
- Black – Отображает твердое дно без придонные структур. Используется для точного определения рельефа дна.

Для точного определения придонных структур, в которых может прятаться рыба (а это каряги, растительность, топляки) необходим уже экран с 300 пикселями по вертикали и 10 оттенками серого. Хорошо если эхолот может определять термоклин (граница водных слове с разной температурой). Термоклин может помочь в поиске рыбы.
Рыба на экране эхолота может отображаться или дугами или символами. Системы идентификации рыб совершенствуются с каждым годом и в основе их лежит главный принцип: у каждой рыбы есть воздушный пузырь, он дает очень сильный отраженный сигнал и по уровню этого сигнала можно достаточно точно определить размер рыбы. Но это только принцип, по факту каждый производитель использует массу параметров для определения типа и размера рыбы. Рыба отображается тремя символами обычно: большая, средняя, мелкая.
Дополнительные функции эхолотов
Эхолот в современном представлении это уже не просто прибор для определения глубины. Сейчас он с легкостью определяет структуру дна, придонную структуру, размеры и типы рыб, температуру воды.
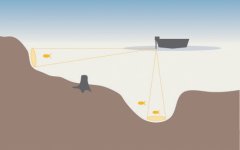
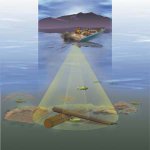
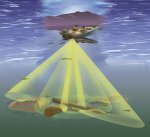
Кроме всего этого эхолоты могут оснащаться дополнительным датчиком бокового обзора. Он показывает данные в стороне от текущего курса судна. Дополнительный беспроводной датчик Смарт Каст показывает рельеф дна и рыбу на расстоянии до 30 метров от стоящей лодки. Он также может использоваться при ловле с берега, т.к. не требует постоянного движения. Дополнительный датчик скорости показывает вашу текущую скорость и измеряет пройденное расстояние. Барометрический датчик – показывает данные о давлении воздух, по которым косвенно можно судить о погоде и прогнозировать ее изменения. GPS навигатор и картплоттер показывают ваше текущее местоположение на подробных картах местности, позволяют сохранять координаты с данными о глубине, траектории вашего движения.
Советы по использованию эхолотов с боковым обзором
![]()
В 2005 году на рынке рыболовных эхолотов произошла революция: компания Humminbird представила первый эхолот с боковым обзором. Рыболовы быстро оценили преимущества новой технологии, и теперь, через десять лет, эхолоты-картплоттеры с боковым обзором присутствуют в линейках многих брендов. Но даже спустя десять лет многие люди, купившие такой эхолот, не знают, как правильно его использовать и как правильно интерпретировать информацию на экране. Неважно, это Side Imaging от Humminbird, StructureScan от Lowrance или SideVü от Garmin, базовые принципы везде одинаковые, и эта статья поможет вам правильно использовать все возможности Вашего эхолота с боковым обзором, на который вы потратили кровно заработанные деньги.
Первый шаг — правильная установка
Прежде всего, необходимо обратить особое внимание на установку датчика эхолота. Если датчик установить неправильно, то отраженный сигнал будет считываться с помехами и искажениями, приводя к путанице и разочарованиям. Есть несколько вариантов размещения датчика. Все они работают, но некоторые дают более чистую картину. Для монтаже можно использовать крепеж, идущий в комплекте, а можно купить дополнительные приспособления.
Датчик ДОЛЖЕН иметь полный обзор из стороны в сторону. На пути сигнала не должно быть никаких препятствий: ни мотора, ни транцевых плит, ни выпуклых деталей корпуса, ни элементов крепления других датчиков. Место крепления датчика на катере может быть разным.
![]()
1. Навесной транец лодочного мотора
Удобное место для установки датчика, хотя придется просверлить несколько сквозных отверстий. Датчик скорее всего не будет работать при глиссировании, зато он защищен от ударов о подводные препятствия.
Под навесным транцем
В зависимости от формы корпуса, под навесным транцем может быть свободное место для установки датчика.
2. Выступ на транце
На больших катерах, таких, как например Ranger, на транце под мотором есть выступ. Это безопасное место для датчика, и поток воды там обычно ламинарный. Датчик скорее всего не будет работать при глиссировании, зато он защищен от ударов о подводные препятствия.
3-4. Транец
Для постоянной установки потребуется просверлить несколько отверстий для установки крепежа датчика. Важно это сделать правильно с первого раза. Для небольших судов (лодки из ПВХ) удобно использовать дополнительно приобретаемую струбцину, крепящуюся к транцу. Удобство этого варианта в том, что можно легко регулировать положение датчика (смещать его вверх-вних и поперек транца). В положении 3 датчик может не работать в режиме глиссирования. В положении 4 датчик будет работать в режиме глиссирования, но возникает опасность повреждения его при ударе о подводное препятствие.
![]()
![]()
На фотографиях показан работающий вариант размещения датчиков LSS-2 и 83/200 на одной съемной штанге. Фотографии размещены с любезного разрешения их автора, igorsd. Обратите внимание, что датчик LSS-2 развернут вперед по ходу движения лодки. Это сделано для того, чтобы нога мотора не перекрывала боковые лучи StructureScan. При таком монтаже необходимо переключить стороны сканирования Left-Right (Лево-Право) в настройках прибора. Такая конструкция на транце лодки из ПВХ испытана на скоростях до 35 км/ч.
5. Троллинговый мотор
Некоторым нравится монтировать датчик бокового обзора на троллинговый мотор. При небольшой практике и на маленьких скоростях из такого монтажа можно извлечь много пользы.
Правильное подключение к источнику питания
Неправильное подключение питания приводит к появлению помех на экране эхолота. В идеале, лучше всего протянуть провода питания напрямую к аккумулятору, а все соединения пропаять. Не забудьте установить в цепь предохранитель, идущий в комплекте с прибором.
Иногда бывает трудно подключиться напрямую к батарее. Если в лодке уже есть проводка, и вы можете подключиться только к ней, то убедитесь, что толщина провода не меньше 1 мм, иначе все-таки придется протягивать отдельный провод питания. Для прожорливого 12-дюймового экрана лучше использовать провода не менее 1.5 мм толщиной.
Место установки антенны GPS-приемника
Прошли те времена, когда картплоттеры комплектовались внешней GPS-антенной. Теперь она внутренняя, и сам картплоттер разнесен с датчиком. Это значит, что между реальным положением объекта и его отметкой на карте будет некоторое расстояние. Поэтому, если Вы хотите, чтобы все интересующие вас объекты находились на карте там, где они действительно расположены, докупайте внешнюю GPS-антенну и устанавливайте ее как можно ближе к датчику.
Если же внешнюю антенну покупать и устанавливать по каким-то причинам нежелательно, то при маркировке объекта устанавливайте курсор немного за ним, чтобы компенсировать разницу в положении датчика и картплоттера, это требует некоторого опыта.
Второй шаг – используйте настройки по умолчанию, сканируйте известные объекты
Не стоит при первом же выходе на воду начинать крутить настройки. Самое правильное будет оставить все настройки как есть на некоторое время. Пройдите рядом с видимыми объектами: со слипами, сваями, камнями, островками травы, чтобы понять, как эти объекты выглядят на экране эхолота. При этом скорость движения судна не должна превышать 5-8 км/ч, а дистанцию бокового сканирования на экране лучше установить не более 25-30 метров, чтобы разглядеть все детали.
Как только вы начнете понимать, что вы видите на боковом обзоре, вы можете начать экспериментировать с настройками.
- Чувствительность и контраст – обработка изображения, заключающаяся в регулировании уровня темного и яркого цветов изображения сигнала сонара, известная также как “уровень белого”. Полезна для того, чтобы отличить рыбу в толще воды от фоновых объектов.
- Скорость прокрутки изображения. Обычно устанавливается значение не более 5 для скорости движения судна от 5 до 8 км/ч, при увеличении/уменьшении скорости движения меняется и скорость прокрутки.
- Масштаб – установка расстояния, показываемого на экране с каждой стороны. При увеличении этого расстояния все информация будет уплотняться в то же самое количество пикселей. Поэтому чем меньше масштаб, тем более детальная картинка (но и более узкая полоса дна) будет показываться на экране.
- Контурный режим – убирает водную колонку из изображения на экране, и сшивает левую и правую половину изображения вместе.
- Только правая сторона/только левая сторона – растягивает только правую или левую часть изображения на весь экран.
- Цветовая палитра – сигнал от сонара показывается в выбранной цветовой гамме.
Третий шаг – использование записи лога сонара
Функция записи лога сонара является одним из самых мощных средств для изучения и оптимизации вашего эхолота с боковым обзором. Удивительно, но большинство пользователей не используют записи лога для этих целей, поэтому здесь мы хотим расширить их горизонты.
Как именно запись лога может помочь нам, рыболовам, научиться правильно читать информацию на экране? Путем записи ВСЕХ данных сонара в файл, так что можно позже проиграть это файл на экране. В процессе проигрывания записи можно изменять любые настройки, чтобы посмотреть, как будет меняться картинка. Запись облегчает эксперименты с настройкой.
Вот что можно изменять в процессе проигрывания записи.
Чувствительность – если она завышена, изображение замывается сигналами от помех. Если чувствительность занижена, важные объекты не показываются. Поэтому наилучшим решением будет оставить этот параметр как он установлен по умолчанию, сделать несколько записей и уже потом экспериментировать.
Контраст – также известный как “Уровень белого”, регулирует уровень освещенности на экране. Более высокий контраст усиливает цвета, но если его завысить, мелкие детали начнут исчезать, а слишком низкий контраст просто затемняет всю картинку.
Резкость – эта настройка регулирует четкость границ объектов. При увеличении резкости изображение становится более зернистым, зато становится возможным обнаружить рыбу, прячущуюся на дне.
Скорость прокрутки изображения – слишком высокая скорость прокрутки на медленно движущейся лодке приведет к размыванию изображения. И наоборот, слишком низкая скорость прокрутки на быстро движущейся лодке также снизит качество картинки, которая “сожмется” в вертикальном направлении. Во время использования бокового обзора при троллинге будет полезно снизить скорость прокрутки до 1 или 2.
Масштаб – это ширина полосы (лодка находится в середине этой полосы), показываемой на дисплее. Чем уже эта полоса, тем более детальное изображение показывается на экране. Чем больше на дне различных структур, тем, по идее, меньше должен быть масштаб. Например большие неглубокие поливы стоит сканировать с масштабом 30 метров или более. При сканировании бровок и других мест с рельефом масштаб стоит уменьшить. Установите масштаб 10-20 метров в каждую сторону, и вы увидите, насколько станет легче увидеть рыбу среди посторонних объектов.
Частоты сканирования 455 и 800кГц
Практически все эхолоты с боковым обзором имеют в своем арсенале частоту 800кГц, но многие рыболовы даже не подозревают об этом инструменте в своем арсенале. На частоте 455 кГц дальше обзор, но максимальная детализация изображения проявляется на частоте 800кГц. Если вы сканируете большие однородные участки дна, и ищете там одиночные изолированные объекты, выбирайте частоту 455кГц. Обнаружили что-то интересное? Пройдите по этому месту уже с частотой 800кГц, для получения более четкого изображения подводных структур.
Цветовые палитры
Различные структуры на дне и состав дна по-разному отображаются на экране в разных цветовых палитрах, так что здесь тоже есть пространство для экспериментов. Пятна глины, ракушка, гравий, камни – все эти интересующие рыболова объекты будут выглядеть немного по-разному в разных палитрах. Опытные пользователи переключаются в определенную палитру при поиске нужных им составов дна.
Просмотр сигнала только с одной стороны от лодки
Предположим, вы сканируете бровку по левому борту в поисках стаи кормовой рыбы и охотящихся за ней хищников. В этом случае уместно будет вывести на весь экран только левую половину изображения, чтобы получить более детальную картину. Когда будете вести сканирование бровки в обратном направлении, переключитесь на правую половину.
Резюме
Итак, мы еще раз обращаем ваше внимание на три основных момента.
- Правильная установка: датчик должен быть установлен в месте с полным обзором из стороны в сторону, питание должно быть подведено к эхолоту проводами достаточной толщины.
- Сначала просканируйте знакомые вам объекты и подводные структуры. Это поможет вам понять, как разные объекты выглядят на экране.
- Записывайте логи. Если увидите интересную придонную структуру, запишите лог на частотах 455 и 800 кГц. Это позволит вам проиграть запись в будущем и поэкспериментировать с настройками.
Чем больше логов вы запишете и проанализируете, тем быстрее вы станете экспертом в использовании технологии бокового обзора в знакомых и незнакомых водоемах. Желаем Вам удачи и удовольствия от использования Вашего оборудования!
Наш магазин предлагаем продукцию Lowrance по низким ценам. Хотите приобрести недорого эхолоты-картплоттеры с боковым сканированием серии Lowrance HDS или Lowrance Elite Ti? Команда нашего магазина будет рада вам в этом помочь!