Эхолот — Погрешности эхолота
Содержание
Погрешности эхолота
Эхолотам свойственны методические и инструментальные погрешности. Методические погрешности зависят от внешних факторов или возникают непосредственно при работе прибора. Инструментальные погрешности являются следствием конструктивных недостатков и неточной установки или регулировки прибора.
К методическим погрешностям относятся:
-отклонение фактической скорости звука от расчетной;
-погрешность эхолота вызванная наклоном морского дна.
К инструментальным погрешностям относятся:
-наличие базы между вибраторами;
-нестабильность частоты вращения электродвигателя;
-неточная установка нуля шкалы прибора.
Погрешность, обусловленная отклонением фактической скорости звука в воде от расчетной . Скорость распространения акустических колебаний в морской воде является функцией ее солености S , температуры t и гидростатического давления pc . При расчете эхолотов скорость распространения звука в воде принимается постоянной и равной 1500м/с. в различных районах плавания скорость распространения звука неодинакова и колеблется от 1420 до 1548 м/с. отклонение фактической скорости распространения звука с от расчетной с0 для эхолота вносит в измеряемую глубину погрешность δ hc . в этом случае измеряемую глубину необходимо исправить поправкой
Поправка может быть автоматически учтена регулировкой частоты вращения электродвигателя времени в соответствии со скоростью звука в воде, либо ручным вводом скорости распространения звука в воде в прибор управления ЦУГ.
Погрешность измеряемых глубин, вызванная наклоном морского дна. Современные эхолоты работают в ультразвуковом диапазоне частот и, следовательно, имеют определенную направленность излучения. Погрешность дна пропорциональна измеряемой глубине, даже для небольших глубин (50-100м) может достигать 5м и более. Поправка за наклон дна равна
Уменьшить величину погрешности можно уменьшением величины угла направленности вибратора.
Погрешность базы между вибраторами. Если в эхолоте используется два вибратора, то при наличии базы L между вибраторами фактическая измеряемая глубина равна
Неучет при расчете эхолота базы между вибраторами приводит к появлению погрешности в измеряемой глубине. Разность между фактической глубиной h и измеряемой h 0 эхолотом называется поправкой за базу
Поправка всегда отрицательна и должна вычитаться из показаний эхолота, так как эхолот будет всегда показывать глубину больше фактической. Величина погрешность базы между вибраторами убывает с увеличением измеряемой глубины и с уменьшением базы. Погрешность базы имеет заметную величину при глубинах меньше 5-6м.
Погрешность вследствие отклонения частоты вращения электродвигателя от расчетной. При расчете регистрирующих устройств эхолота принимается, что время оборота диска указателя или пера самописца соответствует времени измерения максимальной глубины. Следовательно, при данной скорости распространения звука в воде с диск указателя или перо самописца должны делать строго определенное число оборотов. Если фактическая частота вращения n диска или пера будет больше расчетной n 0, то диск или перо повернется на больший угол, а следовательно, эхолот покажет большую глубину, если n n 0, то индикаторы укажут меньшую глубину. Исключение этой погрешности из измеряемых глубин достигается регулировкой числа оборотов электродвигателя с помощью автоматического центробежного регулятора (АЦР). Если погрешность невозможно устранить регулировкой прибора, то вводят поправку за отклонение фактической скорости вращения двигателя от расчетной:
Погрешность, обусловленная неточной установкой нуля шкалы прибора. При несовпадении нулевой отметки с нулевым делением шкалы прибора в измеряемые глубины вносится систематическая погрешность, величина которой равна отстоянию нулевой отметки от нулевого деления шкалы прибора. По величине и знаку она постоянна. Ее можно исключить из измеряемых глубин введением поправки или регулировкой прибора. Положение нулевой отметки на шкале глубин регулируется поворотом кулачка или контактной группы формирователя запуска.
Влияние качки корабля на точность измерения глубин. При сильной качке корабля эхолот работает неустойчиво, точность показаний снижается и измеряемые эхолотом глубины отличаются от истинных. Это объясняется тем, что при качке акустическая энергия излучения распространяется не перпендикулярно к дну, а под углом, зависящим от угла качки. Кроме того, во время качки в верхнем слое воды образуется большое количество воздушных пузырьков. Влияние качки на работу эхолота можно уменьшить выбором места установки вибратора. Для исключения погрешности на качке отсчет глубин необходимо брать в момент, когда крен и дифферент корабля минимальны. Отклонения в показаниях эхолота в этом случае будут наименьшими.
Технические характеристики навигационных эхолотов
Глубина эхолот. Методы измерения глубин
Глубины на море измеряют специальными приборами — лотами.
В зависимости от измеряемой глубины лоты разделяются на:
— глубоководные;
— навигационные.
Навигационные предназначаются для измерения сравнительно небольших глубин. Ими снабжают все морские суда для обеспечения безопасности плавания. Устройство навигационных лотов позволяет измерять глубины на ходу судна с достаточной для судовождения точностью. По принципу действия и устройству навигационные лоты подразделяются на:
— ручные;
— механические;
— гидроакустические. 
Ручной лот. Основными частями ручного лота являются свинцовая (или чугунная) гиря 1 и лотлинь 2 (рис. 1). Гиря имеет форму усеченной пи-рамиды или конуса высотой около 30 см и весом от 3 до 5 кг. Верхняя часть гири оканчивается ушком с продетой в него стропкой из стального троса, обшитого кожей. В нижней, более широкой части гири сделана выемка, в которую перед замером глубины вмазывают смесь сала с толченым мелом. При опускании гири на дно частицы грунта прилипают к замазке. Это позволяет определить характер грунта после подъема лота на палубу.
Гиря соединена с лотлинем, который делают из линя длиной более 50 м и толщиной около 25 мм. Перед разметкой лотлинь хорошо вытягивают. При разбивке за нуль принимают место соединения лотлиня с гирей, так как она при измерении глубины моря обычно ложится на грунт. На расстоянии 2-3 м от гири в лотлинь вплеснивают клевант — колышек из твердой породы дерева, а затем через каждые 10м флагдуки (разноцветные кусочки материи) со следующей последовательностью цветов: красный-10 м, синий-20 м, белый-30 м, желтый — 40 м, бело-красный- 50 м. Каждый десятиметровый участок делят пополам кожаной маркой с «топориками». Марку с одним «топориком» вплеснивают на отметке 5 м, с двумя — 15 м и т. д. Каждый пятиметровый участок разбивают на пять равных частей кожаными марками в виде зубцов: марку с одним зубцом вплеснивают в местах, соответст-вующих 1; 6; 11; 16; 21; 26; 31 и 46 м; марку с двумя зубцами — на 2; 7; 12; 17; 22; 27; 32; 37; 42 и 47 м и т. д. Иногда метровые участки лотлиня разбивают не более мелкие деления небольшими кожаными марочками (для шлюпочного промера).
Лот бросают с наветренного борта, чтобы лотлинь не попал под корпус судна. Ручной лот используют лишь при скорости судна до 5 узлов и глубине моря не более 50 м. При глубинах до 150 м применяют диплот, устройство которого аналогично устройству ручного лота. Измерять глубины диплотом можно только на стоянке.
Ручной лот и диплот используют не только для измерения глубины. Ими определяют дрейф судна, стоящего на якоре, высоту прилива в месте якорной стоянки и др.
Механический лот. Действие механического лота (рис. 2 а) основано на принципе гидростатического давления. Основными частями механического лота являются:- батометрическая трубка, — гиря 1 и лебедка (рис.2 б) с лотлинем 3, снабженная автоматическим тормозом, срабатывающим в момент касания гирей грунта. При помощи гири в море погружают медный пенал 2 с вложенной в него стеклянной трубкой (рис. 2 а), запаянной с одного конца.
По мере погружения заключенный в трубке воздух сжимается под давлением заполняющей ее воды. Глубину погружения трубки определяют по формуле:
Н = h*p0 / δ (l — h)
где h — высота подъема воды в трубке;
р0 —атмосферное давление воздуха на поверхности воды;
δ — вес единицы объема морской воды;
l — длина трубки.
Внутренние стенки трубки покрыты специальной краской, которая смывается морской водой. Это позволяет легко определить величину h. Трубки лотов имеют стандартные размеры. Поэтому глубину определяют при помощи специальной шкалы, рассчитанной по формуле. Прикладывая трубку к шкале 4, глубину определяют по отсчету, совпадающему с границей смытой краски в трубке.
Недостатком механического лота являются трудоемкость процесса из-мерения глубины и возможность использования лишь при скорости судна до 12 узлов.
Гидроакустический лот. Гидроакустическими лотами измеряют глубину до 2000 м при неограниченной скорости судна. Специальные приборы лота — самописцы дают наглядное представление о рельефе морского дна. Большие преимущества гидроакустических лотов способствовали их широкому распространению на морских судах.
Большинство моделей эхолотов определяют плотность дна, вернее его отражающую способность. Простые и дешевые модели эхолотов имеют один зондирующий луч. Ширина луча, как правило, находится в диапазоне от 9 до 24 градусов. Простота конструкции не подразумевает никакого расширения возможностей этих приборов. Таких моделей эхолотов достаточно для поиска ям, перекатов, гряд и просмотра особенностей рельефа дна, над пройденным Вами участком. Поиск же рыбы этими приборами малоэффективен, т.к. зона действия луча крайне узкая. Так например, ширина луча на глубине 10 метров у 9 градусного эхолота составляет всего 1.6 м, а у 24 градусного — 4.3 м. Более дорогие модели эхолотов имеют два или три зондирующих луча. Суммарный угол обзора этих приборов достигает 45-90 градусов. На той же глубине 10 м ширина зоны поиска у дна составляет для прибора с лучом 45 градусов — 8.5 метров, а для 90 градусного — уже 20 м. Эти приборы, как правило, имеют возможность для подключения дополнительных датчиков: бокового обзора, температуры и скорости. Дополнительные датчики позволяют просматривать водную поверхность на расстоянии до 50 метров по бортам судна и определять скорость и пройденный путь за определенное время. Обладая всеми возможностями дешевых моделей приборов, они наиболее приспособлены для поиска рыбы, а по отношению цена/возможности являются наиболее оптимальными. Одними из самых дорогих являются трехмерные эхолоты. Незначительно отличаясь по техническим характеристикам от приборов второй группы, они позволяют более подробно отображать расположение подводных объектов и рельеф дна, представляя полученную информацию в виде трехмерной картинки. С ними можно определить на каком удалении, слева или справа от лодки находится рыба. В комплектацию этих приборов обычно входит датчик температуры и скорости, при подключении которого возможно и определение расстояния до оставленных позади судна объектов. Приборы этой группы имеют улучшенный жидкокристаллический экран больших размеров.
Если вы захотите купить эхолот, то должны знать следующее.
Любой эхолот состоит из четырех основных частей. Передатчик – служит для формирования и посылки ультразвукового сигнала. Излучатель – служит для «фокусировки» ультразвуковых волн. Приемник – служит для приема сигналов отразившихся от поверхности предметов. Микрокомпьютер, который предназначен для обработки полученных данных и вывода их на дисплей.
Для достижения максимальной точности необходимо использовать современные типы эхолотов, которые модернизируют с учетом развития технологий и потребности покупателя. Это достигается путем повышения мощности передатчика, качественным изготовлением излучателей, повышением чувствительности приемника и, конечно же, модернизацией программного обеспечения микрокомпьютера. В современных моделях эхолотов на высококачественном мониторе, можно увидеть различную информацию: глубину, скорость Вашего движения, температуру воды, барометрические данные, размеры затонувших предметов, а самое главное практически «реальную» картинку исследуемого участка дна. Отображение на дисплее подробной информации поможет при навигации и ориентировании в пространстве, и Вы всегда будите в курсе своего местоположения.
Эхолоты делятся на два вида:
Для малых глубин. Для больших глубин.
В первом случае используют частоту ультразвука равную 192 КГц, и узкий конический угол излучателя. Это позволяет точно определить и отличить мелкие предметы, например дух плывущих рядом рыб. Такой эхолот обладает наименьшей чувствительностью к помехам. Во втором случае используют передатчик большой мощности с частотой излучения 50 КГц. У него широкий конусообразный излучатель, плохое разделение и определение предметов и высокая чувствительность к помехам. Глубинные эхолоты используют для обнаружения больших объектов, к примеру, нахождения точного места затонувших судов.


 (11 оценок, среднее: 1,73 из 5)
(11 оценок, среднее: 1,73 из 5)
5.3. Промеры глубин
Промеры глубин выполняют для получения материалов, характеризующих подводный рельеф дна водоема. Промерные работы составляют один из важнейших разделов водных изысканий. Они позволяют выявить и нанести на план участка положение глубоких и мелких мест в русле реки. По этим данным разрабатываются необходимые мероприятия для обеспечения судоходных условий. Подводный рельеф дна водоемов на планах изображается в горизонталях или изобатах – линиях равных глубин.
Промеры ведут по линиям, пересекающим водоем на определенном расстоянии друг от друга. Эти линии называются галсами или промерными профилями. По отношению к направлению течения реки галсы бывают поперечными, продольными и косыми. На практике обычно применяются поперечные галсы. Отдельные точки на галсах, в которых измеряются глубины, называются промерными точками. Плановое положение промерных точек служит для составления плана участка реки. Существует несколько способов проложения галсов. На реках поперечные галсы чаще всего прокладывают по береговым створам, а на озерах и водохранилищах – по компасу.
Промерные работы на водоемах осуществляются с помощью специально оборудованного промерного судна, катера или мотолодки. В зависимости от технического оснащения и способа производства работ промерный отряд состоит обычно из 4-6 человек. Часть отряда размещается на промерном судне, управляет его движением и осуществляет измерение глубин. Другая часть с помощью геодезических инструментов, установленных на берегу, производит координирование промеров – определение планового положения промерного судна в момент измерения глубин. Допускается также измерение глубин в зимний период со льда водоема. Однако эти промеры являются наиболее трудоемкими.
При гидрографических работах применяют следующие основные способы определения планового положения промерных точек: без инструментальных засечек; с инструментальными засечками; с применением спутниковых систем координирования промеров.
При облегченном виде изысканий допускается проведение промеров глубин без координирования. В этом случае необходимо обеспечить равномерное движение промерного судна на галсе, а измерение глубин следует производить через равные интервалы времени. На плане измеренные глубины наносятся равномерно по длине галса от уреза до уреза между начальной и конечной точками. Такой способ удовлетворяет требованиям рекогносцировочного промера.
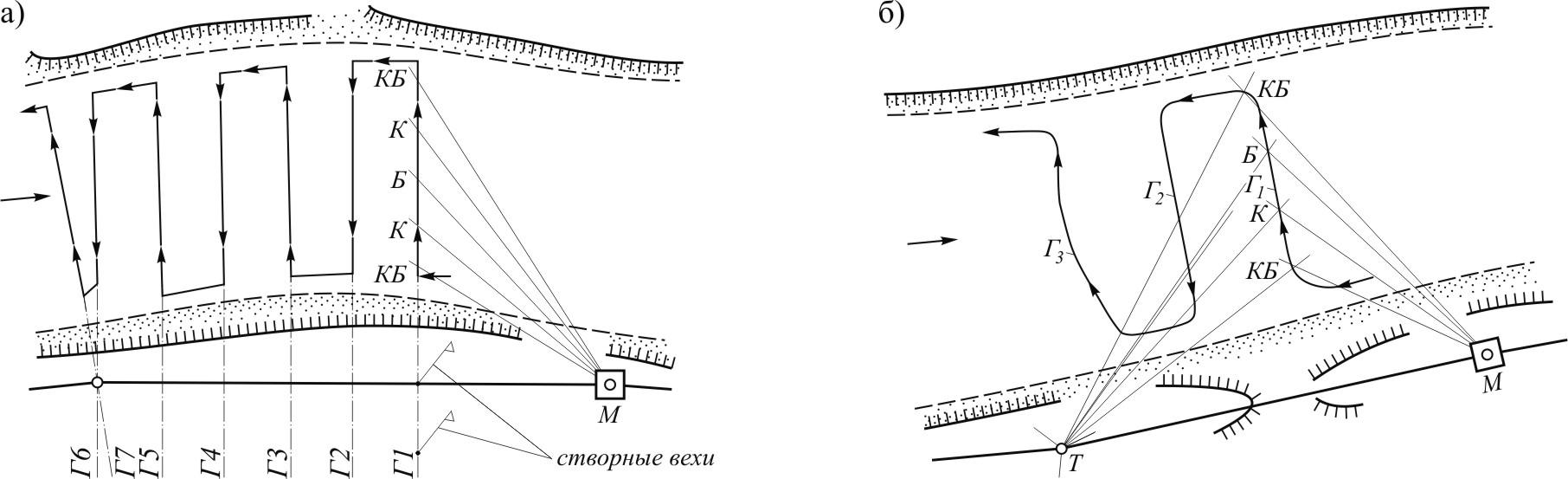
Рис. 5.5. Траектории движения промерного судна (галсы) и схемы засечек
промерных точек одним инструментом (а) и двумя инструментами (б):
Г1, Г2… – расположение промерных галсов; КБ, К, Б – плановое положение промерных точек
Более точные материалы получаются при координировании промеров с помощью геодезических инструментов. При определении местоположения промерного судна можно пользоваться либо одним инструментом – мензулой, либо двумя – мензулой и теодолитом. В первом случае при подготовке к промеру необходимо предварительно разбить на местности положение промерных галсов. В ходе промера глубин на этих точках устанавливаются специальные створные вехи, по которым ориентируется судоводитель. Тогда плановое положение промерного судна в любой момент времени будет определяться пересечением двух линий: направлением галса и направлением визирной оси кипрегеля в момент засечки с одного из пунктов планового обоснования М с известными координатами (рис. 5.5, а). После прохождения галса промерным судном створные вехи устанавливаются на следующем галсе.
В случае использования двух геодезических инструментов при координировании не требуется предварительной разбивки промерных галсов на берегу. Теодолит и мензула устанавливаются на двух пунктах обоснования с известными координатами соответственно в точках Т и М (рис. 5.5, б).
Промерное судно в этом случае движется по свободным галсам. Его плановое положение в момент измерения глубины определяется пересечением двух линий – визирных осей теодолита и кипрегеля. Свои засечки наблюдатели на берегу производят одновременно по команде, подаваемой с промерного судна по рации или с помощью флагов-отмашек.
В последние годы все большее применение на водных изысканиях находят спутниковые системы координирования промеров. Наибольшее распространение получили приборы, работающие в глобальной позиционной системе (GPS), принадлежащей США, и системы ГЛОНАСС, находящейся в ведении России. Такая система содержит обычно два спутниковых приемника, один из которых располагается на движущемся промерном судне, а другой, называемый базовой станцией, на берегу.
С береговой станции осуществляется непрерывная передача собственных координат на бортовой комплекс, что позволяет значительно повысить точность определения планового положения промерного судна на водной акватории. Применение таких систем наиболее эффективно при выполнении промеров глубин на широких водных пространствах – на озерах и водохранилищах. Их использование позволяет уменьшить численность промерного отряда, что приводит к резкому повышению производительности труда на водных изысканиях.
Измерение глубин можно производить наметкой, лотами и эхолотом.
Наметка представляет собой деревянный шест круглого сечения длиной 3.5-6 м и диаметром 5-6 см. На наметке краской наносится разметка с дециметровыми делениями, считая от ее нижнего конца – пятки. Пятка снабжена металлическим башмаком, предохраняющим наметку от продавливания в грунт при измерении глубины. Наметкой измеряют глубины до 5 метров с точностью до 5 см. В настоящее время при измерении глубин наметки используются редко, так как это требует применения ручного труда.
Лоты бывают ручные и опускаемые с лебедки (рыбалоты). Ручной лот состоит из груза массой до 4 кг, подвешенного на капроновом или пеньковом канате (лотлине) диаметром 6-8 мм и длиной до 30 м. Лотлинь размечается на деления через 0.1-0.2 м.
Лот применяется для промеров на озерах и водохранилищах. Точность этого способа ниже и составляет 0.1-0.2 м. Снижение точности измерений происходит за счет прогиба каната и сноса лота течением.
При больших глубинах и скоростях течения более 1 м/с для измерения глубин используется рыбалот. Он состоит из металлического груза обтекаемой рыбовидной формы массой до 30 кг и стального маркированного троса. При измерении глубины груз опускается на дно и в момент касания считывается значение глубины по тросу или по счетчику, установленному на лебедке. Затем груз немного приподнимается и поддерживается в подвешенном состоянии до следующей промерной точки.
Эхолот основан на использовании гидроакустического способа измерения глубин. Сущность измерения заключается в определении времени прохождения ультразвукового сигнала от источника излучения до дна водоема и обратно к приемнику (рис. 5.6).
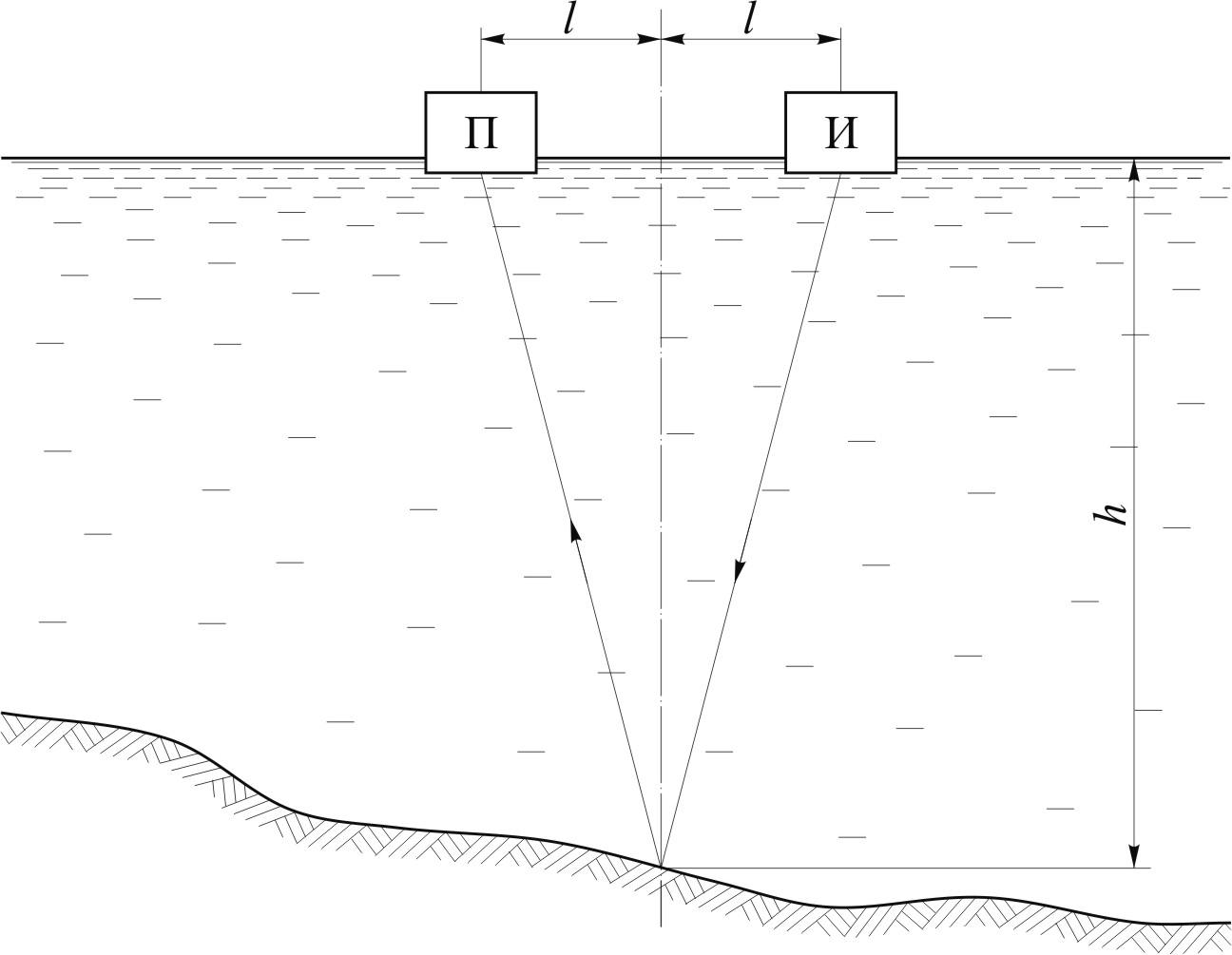
Рис. 5.6. Схема измерения глубин эхолотом:
И – излучатель; П – приемник ультразвуковых сигналов
Ультразвуковой сигнал излучается в виде узкого направленного пучка и способен отражаться от твердых поверхностей. Таким образом, зная расстояние между излучателем и приемником и скорость распространения ультразвука в воде, измеряемая глубина может быть найдена по формуле
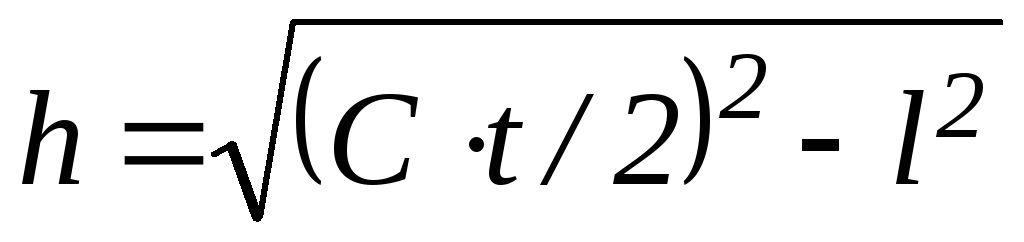 (5.1)
(5.1)
где: С – скорость распространения ультразвука в воде;
t – время прохождения сигнала от излучателя до приемника;
l – база прибора – половина расстояния от излучателя до приемника.
Конструкция эхолотов одного типа позволяет непрерывно измерять глубины по ходу движения промерного судна и автоматически записывать их в масштабе на бумажную ленту – эхограмму. На эхограмме специальными оперативными отметками указываются глубины, измеряемые в момент координирования планового положения промерного судна. В современных эхолотах другого типа измеряемые глубины представляются на индикаторе в цифровом виде, а их хранение обеспечивается на различного рода магнитных носителях – лентах или дисках. Точность измерения глубин эхолотом в диапазоне 0.2-20 м составляет 0.05-0.1 м.
На рис. 5.7 показана функциональная схема современного промерного комплекса для производства водных изысканий.

Рис. 5.7. Функциональная схема промерного изыскательского комплекса



