- Самодельный эхолот для смартфона
- Эхолот своими руками
- Особенности строения эхолота
- Эхолот из смартфона своими руками
- Мини-эхолот
- Выбираем эхолоты для рыбалки с лодки
- Эхолот для рыбалки своими руками
- Эхолот из смартфона своими руками
- Эхолот для рыбалки своими руками
- Принцип работы устройства
- Эхолот рыболова-любителя своими руками.
- Что такое глубиномер для рыбалки?
- Характеристики эхолотов для лодки
- Какими бывают глубиномеры?
- Эхолот
- Знакомство с эхолотом, или специфика сонара
- Ориентируемся по звуку
- Устанавливаем эхолот своими руками
- Вклеиваем датчик эхолота в корпус
- В поисках эха
- Способ первый
- Второй способ
- Третий способ
- Подводим итоги
- Глубиномер своими руками
- С поплавком-маркером
- Из пенопласта и свинцового грузила
- Из свинца и резины
- Беспроводные эхолоты для рыбалки
Самодельный эхолот для смартфона
Евросамоделки — только самые лучшие самоделки рунета! Как сделать самому, мастер-классы, фото, чертежи, инструкции, книги, видео.

Cамодельный мини-эхолот на микроконтроллере Atmel ATMega8L
и
ЖКИ от мобильного телефона nokia3310
Представляю вашему вниманию авторскую разработку – самодельный мини-эхолот на микроконтроллере Atmel ATMega8L и ЖКИ от мобильного телефона nokia3310. Устройство рассчитано для повторения радиолюбителем средней квалификации, но, я думаю, конструкцию может повторить каждый желающий. Материал я старался изложить так, чтобы читателям в доступной форме дать побольше полезной информации по теме. Надеюсь, что повторение конструкции принесет Вам много удовольствия и пользы.
Буду рад ответить на ваши вопросы/пожелания/замечания и помочь в повторении конструкции.
С уважением, Alex
Эхолот, сонар (sonar) — сокращение от SOund NAvigation and Ranging. Эхолот известен где-то с 40-х годов, технология была разработана во время Второй мировой войны для отслеживания вражеских подводных лодок. В 1957 году компания Lowrance выпустила первый в мире эхолот на транзисторах для спортивной рыбной ловли.
Эхолот состоит из таких основных функциональных блоков: микроконтроллер, передатчик, датчик-излучатель, приемник и дисплей. Процесс обнаружения дна (или рыбы) в упрощенном виде выглядит следующим образом: передатчик выдает электрический импульс, датчик-излучатель преобразует его в ультразвуковую волну и посылает в воду (частота этой ультразвуковой волны такова, что она не ощущается ни человеком, ни рыбой). Звуковая волна отражается от объекта (дно, рыба, другие объекты) и возвращается к датчику, который преобразует его в электрический сигнал (см. рисунок ниже).
Приемник усиливает этот возвращенный сигнал и посылает его в микропроцессор. Микропроцессор обрабатывает принятый с датчика сигнал и посылает его на дисплей, где мы уже видим изображение объектов и рельефа дна в удобном для нас виде.
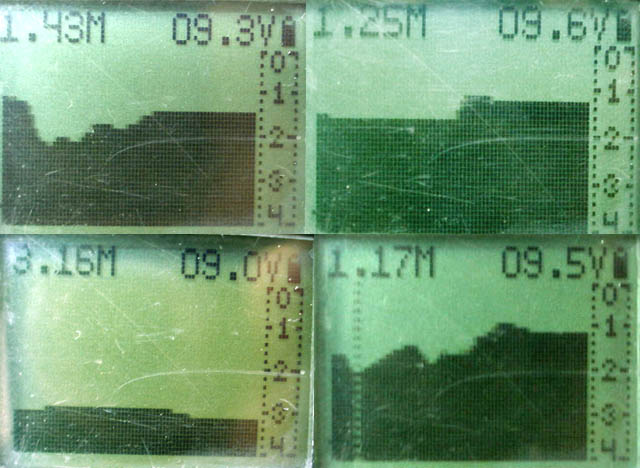
На что следует обратить внимание: рельеф дна эхолот рисует только в движении. Это утверждение вытекает из принципа действия эхолота. Тоесть, если лодка неподвижна, то и информация о рельефе дна неизменна, и последовательность значений будет складываться из одинаковых, абсолютно идентичных значений. На экране при этом будет рисоваться прямая линия.
Первый вопрос, который, я уверен, возникнет у читателей «Почему использован такой маленький дисплей?» Поэтому я сразу на него отвечу: этот «мини-эхолотик» разрабатывался по просьбе знакомого из того, что оказалось под рукой. А этими подручными средствами оказались ATMega8L, дисплей от nokia3310 и какой-то излучатель с обозначением f=200kHz. Еще Вы, наверное, спросите возможно ли переделать программу/схему под другой, больший дисплей? Да. Теоретически это возможно.
От эхолотов, описанных в [1, 2, 3] моя конструкция отличается применением графического ЖК дисплея, что дает устройству преимущества в отображении полезной информации.
Вся конструкция собрана в корпусе «Z14». Питание обеспечивается от аккумулятора 9В GP17R9H. Максимальный потребляемый ток не более 30 мА (в авторском варианте 23мА).
Теперь о возможностях эхолота. Рабочая частота 200 кГц и настраивается под конкретный имеющийся излучатель. Программно реализована возможность измерять глубину до 99,9 метров. Но скажу сразу: максимальная глубина, которую сможет «видеть» эхолот, в большой степени будет зависеть от параметров примененного излучателя. Моя конструкция на данное время тестировалась только на водоеме с максимальной глубиной около 4 м. Прибор показал отличные результаты. По мере возможности постараюсь протестировать работу эхолота на более больших глубинах, о чем будет сообщено читателям.
Итак, перейдем к схеме. Схема мини-эхолота показана на рисунке ниже:
Основные функциональные блоки эхолота: схема управления (тоесть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4. Далее сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16*8*6 из феррита M1000НМ. Первична обмотка наматывается в 2 провода и содержит 2х14 витков, вторичная – 150 витков провода ПЭВ-2 0,21мм. Первой мотается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть: датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был готовый излучатель. Как быть Вам?
Вариант 1: приобрести готовый датчик.
Вариант 2: изготовить самому из пьезокерамики ЦТС-19.
При прошивке микроконтроллера ATMega8L fuse bits выставить согласно картинке ниже :
Полная информация по изготовлению, настройке, прошивке и руководству по использованию мини-эхолота
смотрите в прилагаемом архиве!
Эхолот своими руками

Каждому рыболову известно, что рыба в водоеме группируется в определенных участках, где она может прятаться, спать, размножаться, охотиться. Обычно их местообитания зависит от температуры воды, подводных течений, наличие рельефных объектов, под которыми легко можно укрыться от опасности.
Невооруженным глазом определить, где именно они находятся невозможно. Для этого используются устройства, позволяющие при помощи ультразвуковых излучений изучить рельеф дна и его глубину. Усовершенствованные модели позволяют определить зоны скопления рыбы и отмечать наиболее удачные места улова. Существует два основных вида эхолотов: стационарные и портативные, которые отличаются по функциональным возможностям, размерам и стоимости.
Такие устройства намного упрощают процесс рыбалки, но стоят дорого. Чтобы сэкономить средства, можно сделать эхолот своими руками.
Особенности строения эхолота
Чтобы соорудить эхолот самому, необходимо знать из каких основных частей он состоит и в чем заключается его работа.
Каждый прибор для изучения рельефа дна состоит из следующих функциональных частей:
- передатчик;
- микроконтроллер;
- излучатель;
- приемник;
- дисплей, на котором отражается информация.
Передатчик создает импульс, который преобразуется с помощью датчика излучателя в ультразвуковую волну. Мощность этого сигнала настолько слабая, что не ощущается ни человеком, ни морскими обитателями.
Эта волна распределяется вглубь воды и отражается от объектов, которые находятся в зоне ее распространения. Это может быть дно, рыба, камни или рифы. Достигнув дна, волна возвращается обратно к датчику, который преобразует его в электрический сигнал.
Благодаря приемнику сигнал усиливается, передается на микропроцессор и отображается на дисплее устройства.
В качестве дисплея можно использовать устаревшую версию мобильного телефона. Существует также упрощенный вариант, для работы которого понадобится смартфон.
Эхолот из смартфона своими руками
Портативные модели эхолокаторов позволяют подключать датчик, излучающий ультразвуковую волну, напрямую к гаджету, будь то телефон, планшет или ноутбук. Особенность таких устройств заключается в их простоте и беспроводном соединении. Они работают напрямую через Wi-Fi или Bluetooth. Чтобы устройство сработало, необходимо скачать бесплатное приложение и опустить датчик в воду. При соприкосновении с водой он автоматически включается и начинает отображать актуальную информацию на дисплее смартфона.
Стоимость такого датчика находится в районе 4 тыс. рублей, но по функционалу он почти не уступает дорогим аналогам.
Подключение такого устройства самостоятельно не вызывает никаких сложностей. Достаточно следовать инструкции или просмотреть видео как подключить эхолот своими руками.
Мини-эхолот
Представляю вашему вниманию свою разработку – мини-эхолот на микроконтроллере Atmel ATMega8L и ЖКИ от мобильного телефона nokia3310. Устройство рассчитано для повторения радиолюбителем средней квалификации, но, я думаю, конструкцию сможет повторить каждый желающий. Надеюсь, что повторение этой конструкции принесет Вам много удовольствия и пользы.
Первый вопрос, который, я уверен, возникнет у читателей «Почему использован такой маленький дисплей?» Поэтому я сразу на него отвечу: этот «мини-эхолотик» разрабатывался по просьбе знакомого из того, что оказалось под рукой. А этими подручными средствами оказались ATMega8L, дисплей от nokia3310 и какой-то излучатель с обозначением f=200kHz. Еще вы, наверное, спросите возможно ли переделать программу/схему под другой, больший дисплей? Да. Теоретически это возможно.
От эхолотов, описанных в [1, 2, 3] моя конструкция отличается применением графического ЖК дисплея, что дает устройству преимущества в отображении полезной информации.
Вся конструкция собрана в корпусе «Z14» ( http://www.kradex.com.pl/sklep/328-z14.html ). Питание обеспечивается от аккумулятора 9В GP17R9H. Максимальный потребляемый ток не более 30 мА.
Теперь о возможностях эхолота. Рабочая частота 200 кГц, настраивается под конкретный имеющийся излучатель. Программно реализована возможность измерять глубину до 99,9 метров. Но скажу сразу: максимальная глубина, которую сможет «видеть» эхолот, в большой степени будет зависеть от параметров примененного излучателя. Изготовленная мной конструкция на данное время тестировалась только на водоеме с максимальной глубиной около 4м. Прибор показал отличные результаты. По мере возможности я постараюсь протестировать работу эхолота на больших глубинах и привести результаты испытаний.
 Итак, перейдем к схеме. Схема мини-эхолота показана на рисунке (по клику открывается в большом размере 2222×1645 пикселей, рекомендую для работы со схемой сохранить ее на диск).
Итак, перейдем к схеме. Схема мини-эхолота показана на рисунке (по клику открывается в большом размере 2222×1645 пикселей, рекомендую для работы со схемой сохранить ее на диск).
Основные функциональные блоки эхолота: схема управления (тоесть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC1. Далее сигнал подается на микросхему IC2, где частота сигнала делится на 2. Сигнал с IC2 подается на буферный каскад на микросхеме IC3 и далее на ключи Q1 и Q2. Далее сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS1, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16×8×6 из феррита M1000НМ. Первичная обмотка наматывается в 2 провода и содержит 2×14 витков, вторичная – 150 витков провода ПЭВ-2 0,21мм. Сначала наматывается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть: датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был готовый излучатель. Как быть Вам? Вариантов 2:
- Приобрести готовый датчик.
- Изготовить самому из пьезокерамики ЦТС-19 по технологии, описанной в 3 см. раздел «ссылки».
Вот несколько фотографий (по клику увеличиваются):


Проект еще некоторое время будет в разработке, и если к нему будет проявлен интерес, то его можно будет дополнить пожеланиями/замечаниями читателей. Буду рад ответить на ваши вопросы/пожелания/замечания и помочь в повторении конструкции.
Выбираем эхолоты для рыбалки с лодки

Эхолот для рыбалки своими руками
Самоделки из двигателя от стиральной машины:
1. Как подключить двигатель от старой стиральной машины через конденсатор или без него 2. Самодельный наждак из двигателя стиральной машинки 3. Самодельный генератор из двигателя от стиральной машины 4. Подключение и регулировка оборотов коллекторного двигателя от стиральной машины-автомат 5. Гончарный круг из стиральной машины 6. Токарный станок из стиральной машины автомат 7. Дровокол с двигателем от стиральной машины 8. Самодельная бетономешалка
Cамодельный мини-эхолот на микроконтроллере Atmel ATMega8L
и
ЖКИ от мобильного телефона nokia3310
Представляю вашему вниманию авторскую разработку – самодельный мини-эхолот на микроконтроллере Atmel ATMega8L и ЖКИ от мобильного телефона nokia3310. Устройство рассчитано для повторения радиолюбителем средней квалификации, но, я думаю, конструкцию может повторить каждый желающий. Материал я старался изложить так, чтобы читателям в доступной форме дать побольше полезной информации по теме. Надеюсь, что повторение конструкции принесет Вам много удовольствия и пользы.
Буду рад ответить на ваши вопросы/пожелания/замечания и помочь в повторении конструкции.
С уважением, Alex
Эхолот, сонар (sonar) — сокращение от SOund NAvigation and Ranging. Эхолот известен где-то с 40-х годов, технология была разработана во время Второй мировой войны для отслеживания вражеских подводных лодок. В 1957 году компания Lowrance выпустила первый в мире эхолот на транзисторах для спортивной рыбной ловли.
Эхолот состоит из таких основных функциональных блоков: микроконтроллер, передатчик, датчик-излучатель, приемник и дисплей. Процесс обнаружения дна (или рыбы) в упрощенном виде выглядит следующим образом: передатчик выдает электрический импульс, датчик-излучатель преобразует его в ультразвуковую волну и посылает в воду (частота этой ультразвуковой волны такова, что она не ощущается ни человеком, ни рыбой). Звуковая волна отражается от объекта (дно, рыба, другие объекты) и возвращается к датчику, который преобразует его в электрический сигнал (см. рисунок ниже).
Приемник усиливает этот возвращенный сигнал и посылает его в микропроцессор. Микропроцессор обрабатывает принятый с датчика сигнал и посылает его на дисплей, где мы уже видим изображение объектов и рельефа дна в удобном для нас виде.
На что следует обратить внимание: рельеф дна эхолот рисует только в движении. Это утверждение вытекает из принципа действия эхолота. Тоесть, если лодка неподвижна, то и информация о рельефе дна неизменна, и последовательность значений будет складываться из одинаковых, абсолютно идентичных значений. На экране при этом будет рисоваться прямая линия.
Первый вопрос, который, я уверен, возникнет у читателей «Почему использован такой маленький дисплей?» Поэтому я сразу на него отвечу: этот «мини-эхолотик» разрабатывался по просьбе знакомого из того, что оказалось под рукой. А этими подручными средствами оказались ATMega8L, дисплей от nokia3310 и какой-то излучатель с обозначением f=200kHz. Еще Вы, наверное, спросите возможно ли переделать программу/схему под другой, больший дисплей? Да. Теоретически это возможно.
От эхолотов, описанных в [1, 2, 3] моя конструкция отличается применением графического ЖК дисплея, что дает устройству преимущества в отображении полезной информации.
Вся конструкция собрана в корпусе «Z14». Питание обеспечивается от аккумулятора 9В GP17R9H. Максимальный потребляемый ток не более 30 мА (в авторском варианте 23мА).
Теперь о возможностях эхолота. Рабочая частота 200 кГц и настраивается под конкретный имеющийся излучатель. Программно реализована возможность измерять глубину до 99,9 метров. Но скажу сразу: максимальная глубина, которую сможет «видеть» эхолот, в большой степени будет зависеть от параметров примененного излучателя. Моя конструкция на данное время тестировалась только на водоеме с максимальной глубиной около 4 м. Прибор показал отличные результаты. По мере возможности постараюсь протестировать работу эхолота на более больших глубинах, о чем будет сообщено читателям.
Итак, перейдем к схеме. Схема мини-эхолота показана на рисунке ниже:
Основные функциональные блоки эхолота: схема управления (тоесть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4. Далее сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16*8*6 из феррита M1000НМ. Первична обмотка наматывается в 2 провода и содержит 2х14 витков, вторичная – 150 витков провода ПЭВ-2 0,21мм. Первой мотается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть: датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был готовый излучатель. Как быть Вам? Вариант 1: приобрести готовый датчик. Вариант 2: изготовить самому из пьезокерамики ЦТС-19.
При прошивке микроконтроллера ATMega8L fuse bits выставить согласно картинке ниже :
Полная информация по изготовлению, настройке, прошивке и руководству по использованию мини-эхолота
смотрите в прилагаемом архиве!
Эхолот из смартфона своими руками
Портативные модели эхолокаторов позволяют подключать датчик, излучающий ультразвуковую волну, напрямую к гаджету, будь то телефон, планшет или ноутбук. Особенность таких устройств заключается в их простоте и беспроводном соединении. Они работают напрямую через Wi-Fi или Bluetooth. Чтобы устройство сработало, необходимо скачать бесплатное приложение и опустить датчик в воду. При соприкосновении с водой он автоматически включается и начинает отображать актуальную информацию на дисплее смартфона.
Стоимость такого датчика находится в районе 4 тыс. рублей, но по функционалу он почти не уступает дорогим аналогам.
Подключение такого устройства самостоятельно не вызывает никаких сложностей. Достаточно следовать инструкции или просмотреть видео как подключить эхолот своими руками.
Эхолот для рыбалки своими руками
Основные функциональные блоки эхолота: схема управления (то есть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4, нагрузкой которых является трансформатор Т1. Сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Принцип работы устройства
Несмотря на существенную разницу между портативными беспроводными и стационарными моделями, все эхолоты работают на основе излучения импульсов, которые обрабатываются и предоставляются пользователю в удобном виде. Тот же смартфон с помощью специального приложения графически отразит рельеф дна, покажет глубину и активность рыбы – конкретный набор сведений зависит от модели. Главным средством эхолокации является вышеупомянутый трансдьюсер. Это датчик-излучатель, посылающий сигналы к поверхности дна и принимающий отражаемые волны. В процессе работы эхолот со смартфоном могут менять параметры взаимодействия в зависимости от условий. В частности, пользователь изначально сам может настроить свойства коммуникации, но высокотехнологичные модели способны автоматически корректировать, к примеру, частоту отправки импульсов. После того как информация появилась на экране смартфона, пользователь принимает те или иные решения по изменению тактики ловли. Подобные устройства позволяют искать наиболее благоприятные места для рыбалки.
Эхолот рыболова-любителя своими руками.
Структурная схема, поясняющая устройство и работу эхолота, показана на рис. 1. Тактовый генератор G1 управляет взаимодействием узлов прибора и обеспечивает его работу в автоматическом режиме. Генерируемые им короткие (0,1 с) прямоугольные импульсы положительной полярности повторяются каждые 10 с. Своим фронтом эти импульсы устанавливают цифровой счетчик РС1 в нулевое состояние и закрывают приемник А2, делая его нечувствительным к сигналам на время работы передатчика.
По окончании работы передатчика приемник А2 открывается и приобретает нормальную чувствительность. Эхосигнал, отраженный от дна, принимается датчиком BQ1 и после усиления в приемнике закрывает ключ S1. Измерение закончено, и индикаторы счетчика РС1 высвечивают измеренную глубину. Очередной тактовый импульс вновь переводит счетчик РС1 в нулевое состояние, и процесс повторяется.
Принципиальная схема эхолота с пределом измерения глубины до 59,9 м изображена на рис. 2. Его передатчик представляет собой двухтактный генератор на транзисторах VT8, VT9 с настроенным на рабочую частоту трансформатором Т1. Необходимую для самовозбуждения генератора положительную обратную связь создают цепи R19C9 и R20C11.
Генератор формирует импульсы длительностью 40 мкс с радиочастотным заполнением. Работой передатчика управляет модулятор, состоящий из одновибратора на транзисторах VT11, VT12, формирующего модулирующий импульс длительностью 40 мкс, и усилителя на транзисторе VT10. Модулятор работает в ждущем режиме, запускающие тактовые импульсы поступают через конденсатор С14.
Приемник эхолота собран по схеме прямого усиления. Транзисторы VT1, VT2 усиливают принятый излучателем-датчиком BQ1 эхосигнал, транзистор VT3 использован а амплитудном детекторе, транзистор VT4 усиливает продетектированный сигнал. На транзисторах VT5, VT6 собран одновибратор, обеспечивающий постоянство параметров выходных импульсов и порога чувствительности приемника. От импульса передатчика приемник защищают диодный ограничитель (VD1, VD2) и резистор R1. В приемнике применено принудительное выключение одновибратора приемника с помощью транзистора VT7. На его базу через диод VD3 поступает положительный тактовый импульс и заряжает конденсатор С8. Открываясь, транзистор VT7 соединяет базу транзистора VT5 одновибратора приемника с положительным проводом питания, предотвращая тем самым возможность его срабатывания от приходящих импульсов. По окончании тактового импульса конденсатор С8 разряжается через резистор R18, транзистор VT7 постепенно закрывается, и одновибратор приемника обретает нормальную чувствительность. Цифровая часть эхолота собрана на микросхемах DD1-DD4. В ее состав входит ключ на элементе DD1.1, управляемый RS-триггером на элементах DD1.3, DD1.4. Импульс начала счета поступает на триггер от модулятора передатчика через транзистор VT16, окончания — с выхода приемника через транзистор VT15. Генератор импульсов с образцовой частотой повторения (7500 Гц) собран на элементе DD1.2. Из резистора R33 и катушки L1 составлена цепь отрицательной обратной связи, выводящей элемент на линейный участок характеристики. Это создает условия для самовозбуждения на частоте, определяемой параметрами контура L1C18. Точно на заданную частоту генератор настраивают подстроечником катушки. Сигнал образцовой частоты через ключ поступает на трехразрядный счетчик DD2-DD4. В нулевое состояние его устанавливает фронт тактового импульса, поступающего через диод VD4 на входы R микросхем. Тактовый генератор, управляющий работой эхолота, собран на транзисторах разной структуры VT13, VT14. Частота следования импульсов определена постоянной времени цепи R28C15. Катоды индикаторов HG1-HG3 питает генератор на транзисторах VT17, VT18 [2]. Кнопка SB1 («Контроль») служит для проверки работоспособности устройства. При нажатии на нее на ключ VT15 поступает закрывающий импульс и индикаторы эхолота высвечивают случайное число. Через некоторое время тактовый импульс переключает счетчик, и индикаторы должны высветить число 888, что свидетельствует об исправности эхолота.
Что такое глубиномер для рыбалки?
Основным залогом успеха на любом водоеме является то, насколько правильно и тщательно рыболов определит глубину в месте ловли. От этого зависит грамотный выбор конкретной точки для заброса оснастки, ее особенности и прочие технические нюансы, влияющие на результативность ужения. Издавна для этих целей применялся глубиномер для рыбалки, позволяющий решить поставленную задачу.
Устройства для определения глубины и рельефа дна используются круглый год. Их применяют со льда либо по открытой воде, с ними можно проводить измерения, находясь в лодке или на берегу. Различные варианты глубиномеров позволяют рыболову выбрать оптимальную модификацию под конкретную ситуацию и собственные предпочтения, чтобы в процессе ловли ощущать себя максимально комфортно и непринужденно.
Характеристики эхолотов для лодки
Самые первые эхолоты крепились к лодке. Они имеют датчик, который соединяется с приемником проводом. Датчик опускается на глубину и передает сигнал на приемник. Здесь надо отметить два важных аспекта. Первый – это скорость передвижения плавсредства. Чтобы эхолот успевал обрабатывать сигнал, и картинка получалась четкой, лучше плыть на минимальных оборотах. Это касается более старых моделей эхолотов. Новые устройства способны обрабатывать и передавать сигнал при скорости передвижения лодки 60-80 км/ч.
Второй момент – разрешение экрана у эхолота. Оптимальным разрешением будет 260-300 пикселей. Но даже модели с разрешением в 160 пикселей будут вполне приемлемы.
Перед тем как купить эхолот для рыбалки, следует выбрать модели по количеству отображаемых лучей. По этому параметру устройства разделяют от одно до шести лучевые и на 3D. Мощность лучей — очень важный параметр. Че выше мощность, тем четче получается картинка на мониторе. Еще один важный параметр – это частота излучения датчика. В основном используют модели с частотой излучения 50 и 200 КГц. Эхолоты, работающие на частоте 50 Кгц, охватывают большое пространство, и на дисплее вы увидите значительную площадь акватории. Недостатком подобных моделей является то, что картинка на мониторе получается не очень четкой и мелкие объекты плохо просматриваются.
Датчики, работающие на частоте 200 кГц, хорошо сканируют дно на малых и средних глубинах. Такие эхолоты хороши тем, что они показывают детальную картинку даже при высокой скорости движения лодки. Недостаток данных моделей в небольшом угле охвата участка воды. Вообще, чем больше лучей у эхолота, тем более точной будет картинка и у таких устройств угол охвата достигает 90 градусов. Один луч, к примеру, рисует рельеф дна, а второй ищет рыбу. На экране отображается и рыба, и рельеф дна.
Для троллинговой рыбалки и ловли на дорожку лучше купить четырехлучевые эхолоты для рыбалки. У этих моделей два луча направлены таким образом, что они пересекаются друг с другом. Они имеют частоту излучения 445 Кгц и угол охвата 45 градусов. Полный угол охвата составляет 90 градусов.
Экран у такого эхолота разделен на три части. В первом окошке отображается картинка, которую рисуют два луча. В двух оставшихся окошках отображены картинки, которые чертят два других луча. В результате на экране модно видеть рельеф дна и рыб, как справа, так и слева лодки и под ней.
Самую полную картину рисуют шестилучевые и 3 Д эхолоты. В датчике расположены 8 излучателей с углом охвата 16 градусов. Рядом стоящие лучи пересекаются друг с другом и таким образом получается очень детальная картинка. Общий угол охвата может быть до 60 градусов.
З Д эхолоты рисуют трехмерное и двухмерное изображения участка реки. Такие эхолоты для рыбалки, как правило, получают самые лестные отзывы.
Все эхолоты рисуют рельеф дна только в движении. Если датчик занимает статичное положение, то на дисплее будет отображаться ровная поверхность с указанием глубины в точке, где он расположен. Картина получается в результате движения и сканирования пространства исходящими от датчика лучами. Информация от лучей передается на приемник, она обрабатывается и усредняется. Усредненная информация передается на монитор, и получается общая картинка с рыбами, бровками, свалами, корягами и травой.
Основной показатель эхолотов – это значения глубины и температура воды в поверхностном слое. На моделях с навигацией GPS или с датчиком скорости можно увидеть скорость передвижения лодки.
Рельеф дна рисуется достаточно точно. А вот со структурой могут возникнуть проблемы. Чем мощнее эхолот и чем лучше разрешение экрана, тем качественней будет отображена структура дна. На экране можно видеть дно с разными цветами на различных участках.
Естественно, что на цветных дисплеях информация о структуре дна воспринимается лучше. По цветам можно определить его твердость и количество травы на отдельных участках.
Ну и конечно же, рыбаков интересует наличие рыбы на участке. На многих моделях указана не только рыба, но и глубина ее расположения, как на рисунке выше. Возле каждой рыбки присутствует цифра. Она обозначает глубину, на которой эта рыба находится. Как правило, рыбы отображаются в трех размерах. Вообще, метод обнаружения рыб является секретом фирмы- производителя. Основная идея заключается в том, что рыбы обнаруживаются по плавательному пузырю, который посылает мощны сигнал. По силе этого сигнала и определяется величина рыбы. По диаметру пузыря определяется величина рыбы. Но это общие соображения. Есть много других факторов, влияющих на обнаружение рыб: глубина в месте сканирования, скорость передвижения рыб, количество лучей и т.д.
Какими бывают глубиномеры?
Глубиномер – устройство, предназначенное для измерения глубины и изменения рельефа дна в заданной акватории. С его помощью можно обнаружить различные аномальные зоны на участке ловли и определить самые потенциально перспективные точки, куда стоит послать оснастку. Он помогает найти свалы, канавки, возвышенности, локальные бугорки, приямки и прочие характерные места стоянки рыбы.
Глубиномеры для рыбалки можно смастерить самому либо приобрести в магазине. Самодельное изделие дешево, просто и надежно. Заводское дороже, но не придется тратить время на его изготовление. Самый современный прибор для измерения глубины – эхолот. Сегодня именно он пользуется наибольшим спросом и применяется многими рыбаками.
Эхолот
Знакомство с эхолотом, или специфика сонара
С появлением недорогих эхолотов ориентироваться на воде стало намного проще. Раньше основным инструментом «маломерщиков» была лоция, зачастую не видевшая руки корректора годами, а посему не учитывающая изменений структуры дна. Сегодня картинкой дна в реальном времени уже никого не удивить.
- Для рыболовов и любителей дайвинга существуют дорогие структурные сканеры, которые с удивительной точностью показывают цветную картину дна.
- Путешественникам доступны картплоттеры, совмещающие в себе функции навигатора, эхолота, а также панели приборов контроля двигателей.
- Владельцам тихоходных яхт помогают вперёдсмотрящие эхолоты. Для скоростных судов в условиях небольших глубин эти приборы не актуальны, так как мало отличаются по функционалу от обычного сонара. Ведь датчик способен «заглядывать» вперёд всего на 2-3 глубины.
- Наиболее массовый сегмент – недорогие одно- и двухлучевые эхолоты. Они используются рыбаками, туристами, и даже любителями подлёдного лова.
Даже самый простой прибор способен измерять температуру забортной воды, сообщать о падении напряжения бортовой сети, а также информировать звуковым сигналом о резком уменьшении глубины. Индикацию «рыбок» рассматривать не будем, потому что сегодня мы ведём разговор о пользе сонара для судовождения в условиях недостаточной глубины.
Ориентируемся по звуку
Принцип работы эхолота не изменился за последнюю сотню лет. Уменьшились размеры приборов, оптимизировались алгоритмы обработки сигнала. Но по-прежнему приёмопередатчик отправляет высокочастотный сигнал вглубь воды и ждёт, когда он вернётся, отраженный от рельефа дна.
В зависимости от плотности грунта отраженный сигнал ослабевает. Для получения данных о глубине прибор анализирует время возврата сигнала. Структуру дна характеризует ослабление сигнала. Таким образом, на экране эхолота мы видим рельеф дна различного оттенка – от черного (камень) до светло-серого (ил).
Индикация «рыбок» основана на определении воздушных вкраплений в толще воды – плавательных пузырей предполагаемых рыб. Если для рыболовов эта опция может представлять определённый интерес, то для судовождения она абсолютно бесполезна и отвлекает внимание.
В процессе управления скоростной моторной лодкой на судоходных реках средней полосы России не столько важны абсолютные значения глубины, сколько динамика её изменения. Если под килем 5-6 метров, и картинка дна резко поползла вверх – это повод для коррекции курса – скорее всего, мы сбились с судового хода и движемся на свал. В Карелии вполне возможно разбить редуктор мотора и при глубине более 5 метров. Подводные камни зачастую стоят поодиночке и не выходят на поверхность. Вкупе с колебаниями уровня воды на таких водоёмах с каменистым дном нужно быть особо внимательным.
Иное дело – когда глубина 30, 50, а то и более 100 метров. В этом случае показания эхолота не имеют приоритетного значения. Однако не стоит недооценивать важность этого прибора – ведь рано или поздно придется идти в прибрежной полосе, где могут находиться затопленные сваи, корпуса больших судов и каменные косы.
Для того, чтобы избежать хаотичного изменения показаний на скорости глиссирующего судна, достаточно вручную ограничить диапазон глубин. Практически все приборы позволяют это сделать. Таким образом, исключаются гармоники, кратные реальной глубине.
Устанавливаем эхолот своими руками
Приятно проводить время, занимаясь улучшением лодки. Установка эхолота – полезное занятие. Поэтому вооружимся знаниями и приступим к монтажу.
По поводу дисплея вариантов не так много. Его устанавливаем сверху на горизонтальную часть панели или на наклонную, обращенную к судоводителю. Важно, чтобы экран не перекрывал обзор при движении под тентом и не бликовал в солнечную погоду.
Ситуация с выносным датчиком гораздо сложнее. Поскольку в нём располагаются не только приёмник и передатчик, но ещё и датчик температуры, важно обеспечить надёжный контакт с водой. По конструкции датчики различаются на внешние (забортные) и встраиваемые в днище. Каждый из этих вариантов обладает своими недостатками.
- Забортный датчик, устанавливаемый за транцем, обладает массой недостатков. При достаточном заглублении создаёт фонтан брызг во время глиссирования. Во время швартовки кормой к берегу легко повреждается крепление датчика. Этот способ установки (2 самореза и одно отверстие для кабеля) наиболее простой, в инструкциях к приборам он подробно описан.
- Встраиваемый датчик требует установки в днище. Существует правило, что если можно избежать лишних отверстий ниже ватерлинии – лучше их не делать. Исключение – датчик впередсмотрящего эхолота. Но он ставится ближе к носовой части (в первой трети) днища, в этом случае лучше доверить установку людям с опытом и соответствующим инструментом.
- Промежуточное решение – подъёмный транцевый датчик, установленный на струбцине с регулировкой по высоте. По сути, используется три положения. При подходе к берегу достаточно поднять датчик. Для рыбалки нужно опустить вниз. На ходу можно отрегулировать так, чтобы при минимуме брызг можно было понять приблизительную картину дна. Однако, имея мотор с гидроподъёмом и электрозапуском, каждый раз бегать к транцу и упражняться с установкой быстро надоест. Поэтому такое решение в основном применяется для надувных лодок-тузиков, где приходится сидеть за румпелем у транца.
- Оптимальный вариант с точки зрения совокупности эксплуатационных качеств – установка (вклейка) датчика, предназначенного для внешней установки, внутрь корпуса. Такой способ не рекомендуют инструкции по причине того, что сложно обеспечить стабильный результат. А производителю оборудования не нужны претензии.
Поскольку мы ещё относимся к исчезающему подвиду «Homo sovieticus», то в нас с детства сидит тяга к экспериментам, творчеству и различным исследованиям. Вот и датчик эхолота мы разместим изнутри на днище рядом с транцем.
Возможные варианты рассмотрим в следующей главе.
Вклеиваем датчик эхолота в корпус
Действительно, весьма заманчиво выглядит возможность пользоваться эхолотом на любой скорости, при этом, не вмешиваясь в конструкцию днища, не опасаясь за повреждения датчика, и не имея фонтана брызг за транцем. Почему все так не делают? Рассмотрим случаи, когда такой способ невозможен или требует слишком больших НИОКР ☺
- Корпус с поперечными реданами. Аэрируемое днище благоприятно сказывается на скоростных показателях судна, но совершенно не подходит для установки внутрь датчика эхолота из-за пузырьков воздуха в пограничной среде. Эхолот в этом случае будет работать только во время стоянки и при движении в водоизмещении.
- Деревянный корпус. Не фанера, оклеенная стеклотканью, а настоящее дерево. Из-за пористой структуры доски экран прибора предательски молчит.
- Водоизмещающие корпуса с вельботной кормой, которая на волнах оказывается в воздухе. В этот момент показания прибора теряются.
- Некоторые пластиковые корпуса с двойными стенками. В таких «сэндвичах» пространство между стеклопластиком заполнено двухкомпонентной полиуретановой пеной, и для установки датчика нужно резать внутреннюю «скорлупу», а её жалко, особенно на новой лодке.
- Пространство в районе киля и продольных реданов на килеватых корпусах. Завихрения и пузырьки воздуха не дадут спокойно работать прибору, поэтому перед окончательной установкой проверим функционирование прибора в нескольких местах и выберем лучшее.
Для обеспечения постоянства среды применяют антифриз, эпоксидную смолу, автопластилин, силиконовый герметик, термоклей, смазку для медицинского прибора (УЗИ). Понятно, что все эти материалы вносят погрешность в показания прибора и ухудшают чувствительность, однако практика показала работоспособность такой схемы.
Вклеенные датчики отлично работают на стеклопластиковых и алюминиевых лодках. Однако гарантировать работоспособность предложенных схем именно на вашем корпусе никто не сможет. Поэтому остаётся действовать методом проб и ошибок.
В поисках эха
Итак, кабель протянут по всем правилам, монитор закреплён и заботливо укрыт крышкой, а в корме радом с трюмной помпой лежит датчик эхолота. Наша задача – найти оптимальное место, чтобы датчик не мешал коммуникациям (например, сливу подсланевых вод), а на показания не слишком влияли пузырьки воздуха, попадающие под днище на ходу. Достигнуть требуемого результата можно тремя способами.
Способ первый
Прикрутить датчик к транцу изнутри, направив луч вниз перпендикулярно поверхности воды. В этом случае обязательно постоянное наличие определённого уровня подсланевых вод, чтобы между датчиком и днищем не было воздушного клина. Автор этой статьи долгое время имел лодку, в которой для корректной работы эхолота было достаточно вылить под слани всего 2 литра забортной воды.
Причем это было найдено экспериментальным путём, когда было испробовано 5 или 6 положений датчика. Эхолот никак не хотел работать. Заезды было решено прекратить, лодку поднять. Как обычно, после постановки на прицеп сливной шпигат был открыт для просушки, но воды под сланями не было. Решив поправить лодку на прицепе, загнал её обратно в воду, не закрутив пробку. Каково же было удивление, когда эхолот вдруг исправно заработал. Прием даже на скорости более 60 км/ч. В результате каждая поездка начиналась с выливания двухлитровой бутылки на пол, чему очень удивлялись гости.
Второй способ
Заключается в приклеивании датчика на силикон на ровный участок днища между реданами. Стараемся плоскость датчика зафиксировать не параллельно днищу, а параллельно воде. Однако небольшое отклонение (до 10-15 градусов) допустимо.
В качестве фиксирующей массы используем силиконовый герметик или автопластилин. Если на ходу испытания покажут правильность выбранного места, можно переклеить датчик на эпоксидный клей. Однако стоит убедиться в отсутствии пузырьков воздуха между датчиком и днищем.
Третий способ
В какой-то степени он сочетает достоинства первого и второго способов. Смысл его в том, чтобы между датчиком и днищем была жидкость-проводник, но в самой лодке этой жидкости не было. Несколько мудрено, правда? Попробуем разобраться и установить датчик.
Для монтажа нам потребуется ёмкость с узким горлом и ровным основанием. Для этого отрежем верхнюю часть двухлитровой пластиковой бутыли или полиэтиленовой канистры. Под куполом ближе к дну зафиксируем датчик. Провод сенсора будет выходить через горлышко бутылки.
Основная задача – надёжно зафиксировать край ёмкости к днищу. Соединение должно быть герметичным и надёжным. Можно использовать силиконовый герметик или эпоксидную смолу. Для лучшей прочности соединения край пластика, прилегающий к днищу, делаем шершавым с помощью шкурки. Приклеенный купол оставляем сохнуть. После полимеризации приступаем к самому главному.
Заполняем ёмкость через горлышко антифризом. Это позволит оставлять лодку с датчиком зимовать на морозе и забыть о том, что эхолот установлен нештатным образом. Если у вас получится надёжно зафиксировать купол к днищу, а датчик к куполу, вы получите оптимальный вариант установки датчика. Стоит заметить, что если вы остановитесь на третьем способе, прокладывать кабель датчика заранее не следует. Первым действием будет продевание разъёма в горлышко бутылки, потом вклейка, заполнение, тестирование, и только на заключительном этапе – прокладка кабеля.
Стоит заметить, что установка изнутри корпуса влияет на точность измерения температуры забортной воды, демпфируя показания. Поэтому если для вас температура является приоритетным показателем – либо выносите датчик за борт, либо ожидайте 5-10 минут, пока изменения температуры воды дойдут до датчика, нагрев (или охладив) днище. В корпусах из сплава алюминия этот эффект минимален, в стеклопластиковых выражен сильнее.
Правильно установленный датчик эхолота ничем не выдаёт своего присутствия и радует судоводителя стабильными показаниями на дисплее прибора.
Подводим итоги
Эхолот – это не только прибор, показывающий глубину. Это незаменимый инструмент при управлении маломерным судном. Основываясь на его показаниях и сверяя их с лоцией, можно уверенно ходить в сложных местах, многократно снижая риск сесть на мель или повредить движитель.
Дорогие модели картплоттеров занимают центральное положение на панели, вытесняя остальные приборы. По сути, экран картплоттера – это центральный пульт бортовой системы. Он способен заменить всю остальную телеметрию — позиционирование на карте, лоцию, систему навигации, спидометр, компас, приборы контроля двигателя и часы. И лишь принцип резервирования заставляет нас иметь отдельный аналоговый компас и запасной навигатор.
Глубиномер своими руками
Самым простым решением приобрести глубиномер для рыбной ловли является изготовление его самостоятельно в домашних условиях. Это устройство легко сделать из подручных материалов. Сегодня среди рыболовов распространены следующие типы этих приспособлений:
- из свинцовой груши;
- с поплавком-маркером;
- из свинца и резины;
- из пенопласта и свинцового грузила.
Ниже рассмотрим некоторые варианты изготовления глубиномера своими руками, их преимущества и особенности.
С поплавком-маркером
Простая и надежная конструкция глубиномера, которая к тому же является весьма эффективной на разных малознакомых водоемах. Пошаговая инструкция ее изготовления выглядит так:
- Берется пенопластовый шарик либо круглый поплавок грузоподъемности порядка 15–20 грамм.
- На леску с помощью вертлюжка цепляется грузило необходимого веса. Во многих случаях достаточно 50–60 граммов.
Фото 1. Две унции равны примерно 56 граммам.
Все. Глубиномер готов. Теперь можно приступать к измерениям глубины в месте ловли и определению рельефа дна:
- Для начала на бланке удилища следует нанести какую-либо отметку для измерений. От ролика лесоукладывателя отмеряется 50 см и вокруг бланка несколько раз обматывается изолента.
Фото 2. Маркировка изолентой.
- Определив значение глубины в первой точке, подматываем катушкой леску и сдвигаем груз на один-два метра, повторяя процедуру измерений.
Таким образом, «прозваниваем» все направление до берега. После выполняем забросы под разными углами и измеряем глубину. В течение получаса можно досконально изучить рельеф в зоне ловли и определить потенциально уловистые точки.
Из пенопласта и свинцового грузила
Этот вариант также предназначен для измерения с берега, по принципу действия схож с первым устройством. Изготовить его можно так:
- Берем кусок пенопласта прямоугольной или квадратной формы. В нем проделываем сопрягающиеся два отверстия, расположенные под углом 40–50 градусов к горизонтальной оси.
- В отверстие вставляем использованный стержень от простой шариковой ручки.
- Леска для измерения глубины пропускается через стержень.
- К ее свободному концу крепится свинцовый груз необходимого веса напрямую либо с помощью вертлюжка.
Этот глубиномер позволяет весьма точно измерять глубину на стоячих водоемах. На реках с течением получаем значения с некоторой погрешностью.
Из свинца и резины
Этот глубиномер предназначен не столько для промера участка ловли, сколько для определения максимально привлекательного для рыбы нахождения приманки. Применяется в поплавочной или штекерной рыбалке, когда необходимо насадку приподнять над пятном прикормки на 3–5 см, сделав ее заметнее и аппетитнее для рыбы. Выглядит и изготавливается следующим образом:
- На крючок цепляем прямоугольный кусочек резины.
- На его другом крае фиксируем свинцовый груз весом, способным утопить применяемый поплавок.
Этот простейший глубиномер позволяет быстро настроить оснастку, и расположить приманку на оптимальном расстоянии от дна.
Фото 3. Вариант: силикон и джиг головка. Крючок цепляем за силикон.
Беспроводные эхолоты для рыбалки
Относительно недавно в продаже появились беспроводные эхолоты для рыбалки. Купить их могут те рыболовы, которые рыбачат с берега. Эти модели состоят из датчика и приемника с дисплеем. Связь между датчиком и приемником либо Вай фай, либо Блютуз. В качестве приемника может быть смартфон или планшет, работающие на ОС Андроид. На устройство устанавливается приложение, которое бесплатно можно скачать с плеймаркета
Какие бывают беспроводные эхолоты для рыбалки? Одним из лучших беспроводных эхолотов является Deeper Smart Fishfinder 3.0. На эту модель можно найти много положительных отзывов. Сего помощью можно сканировать дно на расстоянии до 100 метров. Датчик привязывается к леске через ушко и забрасывается, как кормушка или грузик. Датчик достаточно далеко летит. После забросов на экране телефона появляется достаточно яркая картинка:
На ней отображена информация по рельефу и структуре дна, температура воды и наличие рыба на участке. Вы подматываете эхолот к берегу и на экране происходит изменения картинки.
Есть более бюджетные модели беспроводных эхолотов. Они имеют черно- белый экран, но также показывают и рельеф дна, и наличие рыбы, и температуру воды. Одной из самых доступных и функциональных моделей является китайская модель FishFinder FFW-718. Она состоит из датчика и приемного устройства с экраном. Это устройство достаточно точно показывает глубину, рисует структуру дна и показывает градусы воды. Этот эхолот для рыбалки получает неплохие обзоры и комментарии даже от опытных рыболов.
Беспроводные эхолоты будут полезны поплавочникам, фидеристам и спиннингистам. Их можно использовать как с берега, так и с лодки, в летнее время и зимой при ловле с лунки.