- Как сделать робота на Ардуино своими руками: самодельный robot Arduino в домашних условиях
- Шаг 1: Необходимые материалы
- Шаг 2: Делаем каркас робота
- Шаг 3: Монтируем электронику
- Шаг 4: Устанавливаем «глаза» робота
- Шаг 5: Схема подключений
- Шаг 6: Код
- Шаг 7: Завершенный робот
- Объезжающий препятствия робот на Arduino
- Необходимые компоненты
- Принцип работы ультразвукового датчика HC-SR04
- Схема проекта
- Объяснение программы для Arduino
- Строим робота-охотника за светом
- Читайте также
- Строим солнечный двигатель
- Изготовление робота-тестера
- Усовершенствование робота-тестера
- Рука робота, управляемая УРР
- Строим черепаху Вальтера
- Список компонентов для робота-черепахи Вальтера
- Список деталей робота – устройства телеслежения
- Создание шагающего робота
- Конструкция робота
- Список деталей конструкции шагающего робота
- Конструкция робота
- Список деталей для изготовления робота-солнечного шара
- Список деталей для робота-рыбы
- Обучение робота
- Внутренний мир робота
Как сделать робота на Ардуино своими руками: самодельный robot Arduino в домашних условиях
В сегодняшней статье я расскажу вам, как сделать робота, обходящего препятствия, на базе микроконтроллера Ардуино своими руками.
Чтобы сделать робота в домашних условиях вам понадобится собственно сама плата микроконтроллера и ультразвуковой сенсор. Если сенсор зафиксирует препятствие, сервопривод позволит ему обогнуть препятствие. Сканируя пространство справа и слева, робот выберет наиболее предпочтительный путь для обхода препятствия.
У робота есть индикаторный диод, зуммер, сигнализирующий об обнаружении препятствия, и функциональная кнопка.
Самодельный робот очень простой в исполнении.
Шаг 1: Необходимые материалы
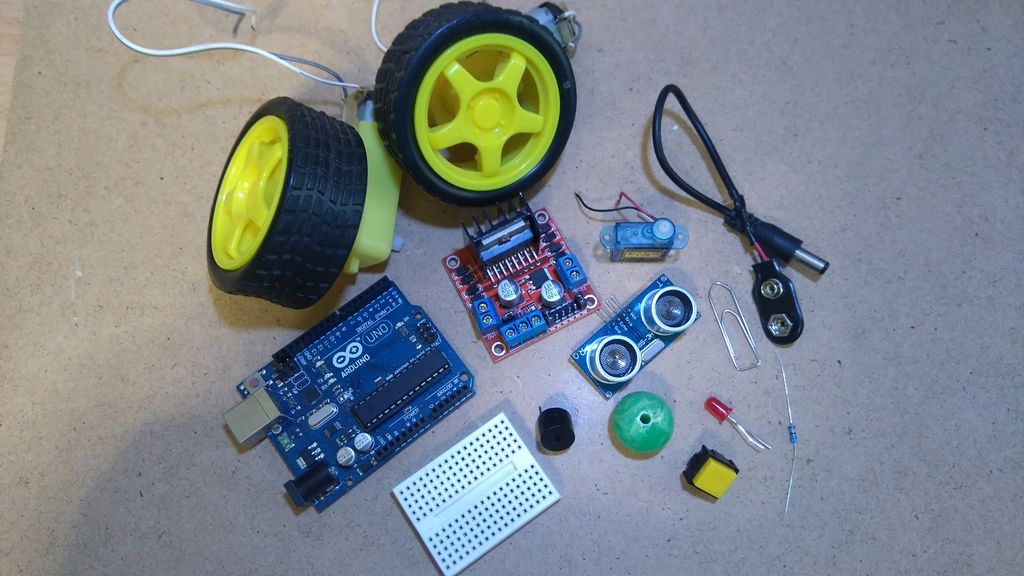
- Arduino UNO
- Мини макетная плата
- Драйвер двигателя L298N
- Два электромотора с колесами
- Ультразвуковой датчик измерения расстояния HC — SR04
- Микросервопривод
- Кнопка
- Красный диод
- Резистор 220 Ом
- Отсек для элемента питания 9В (с/без коннектора)
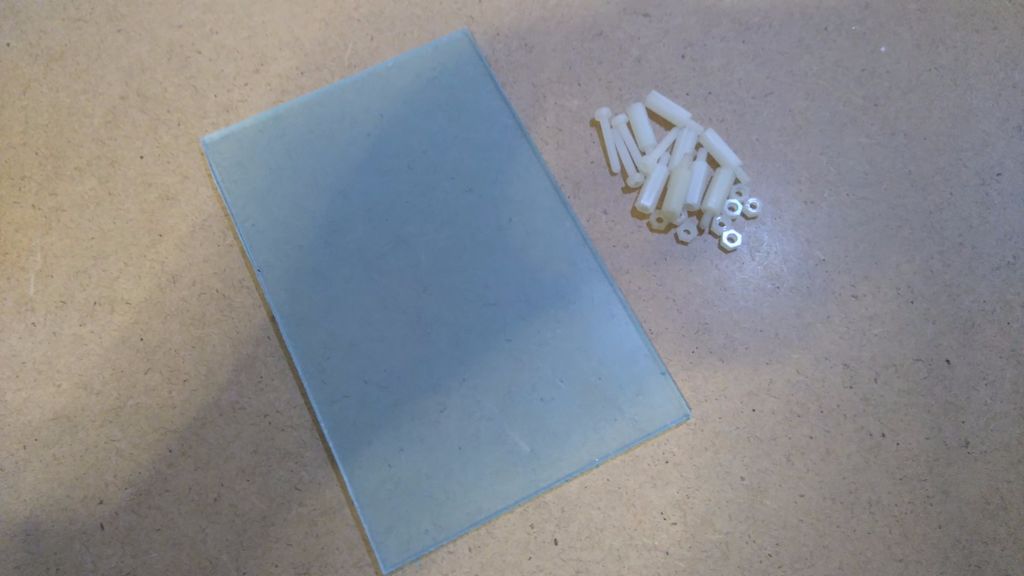
- 8 стоек для макетных плат с наружной и внутренней резьбой, 8 винтов и 8 гаек
Также вам понадобится одна большая металлическая скрепка и бусина (для заднего опорного колеса).
Для изготовления каркаса робота использован кусок плексигласа (оргстекла) 12х9,5 см. Можно сделать каркас из дерева или металла, или даже из компакт-дисков.
- Дрель
- Суперклей
- Отвертка
- Клеевой пистолет (опционально)
Для питания робота используется батарейка 9В (крона), она достаточно компактная и дешевая, но разрядится уже примерно через час. Возможно, вы захотите сделать питание от аккумулятора на 6 В (минимум) или 7 В (максимум). Аккумулятор мощнее батарейки, но и дороже и больше по габаритам.
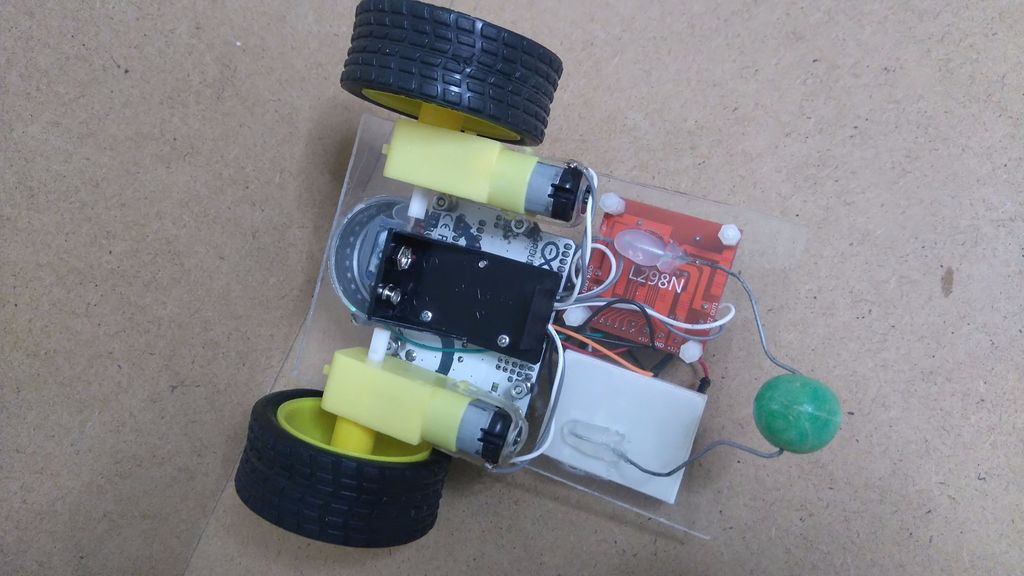
Шаг 2: Делаем каркас робота
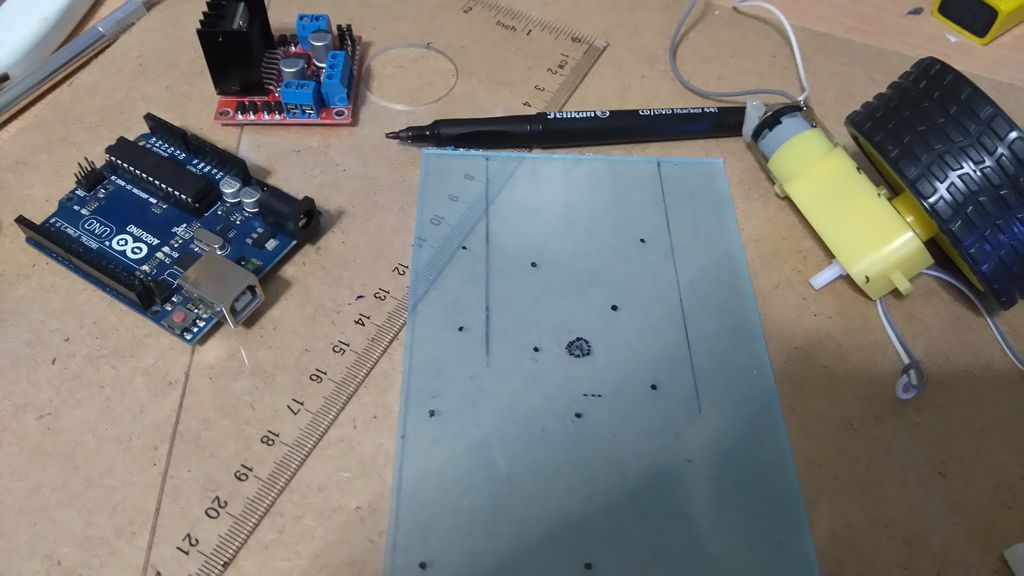
Положите всю электронику на плексиглас и маркером отметьте места, где нужно будет просверлить монтажные отверстия (фото 1).
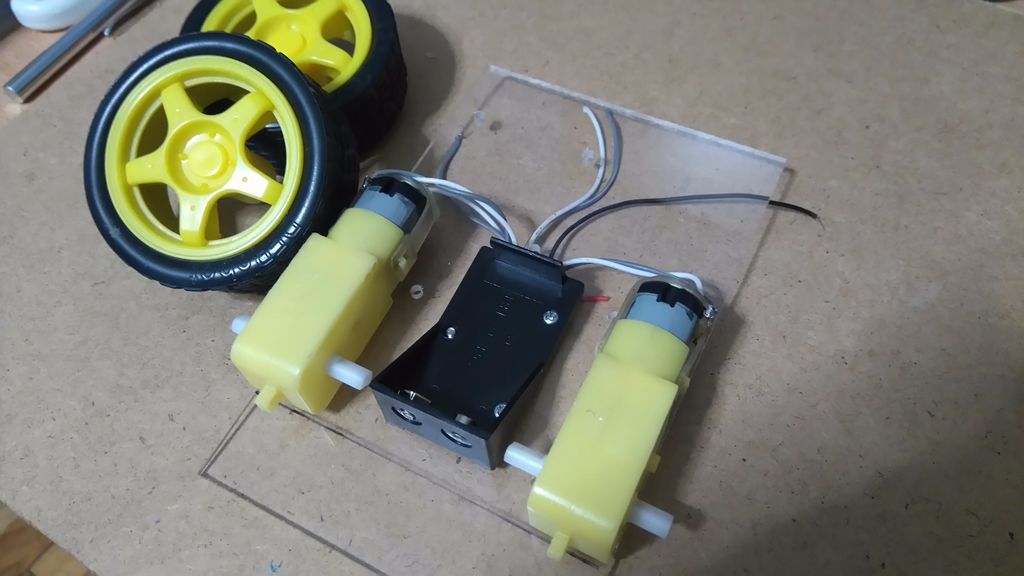
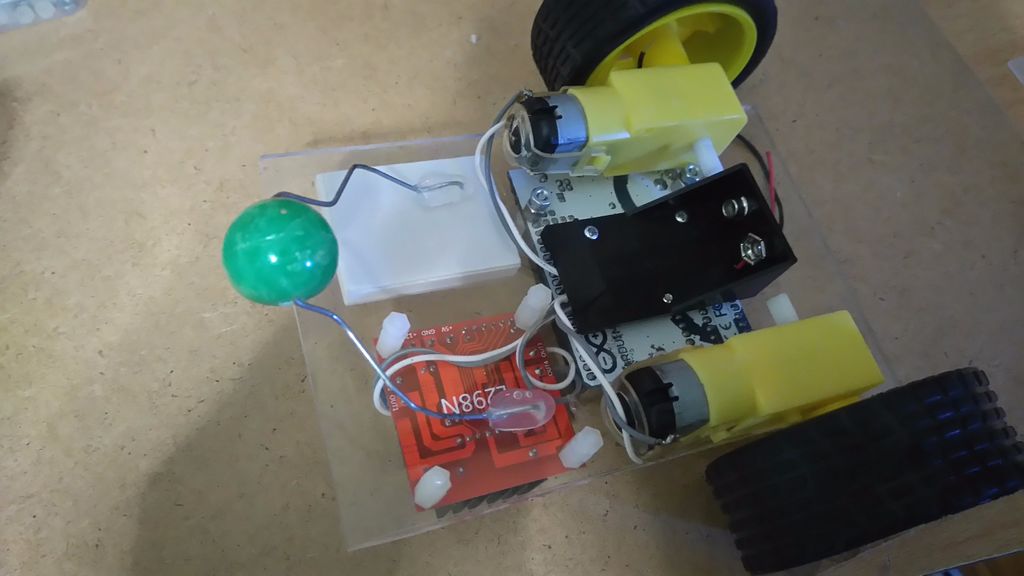
На нижней стороне пластины плексигласа приклейте на суперклей электромоторы. Они должны быть параллельны друг другу, с помощью линейки-угольника проверьте их положение прежде чем клеить (фото 2). Затем приклейте на суперклей отсек для батарейки.
Можно также просверлить отверстия под провода электромоторов и питания.
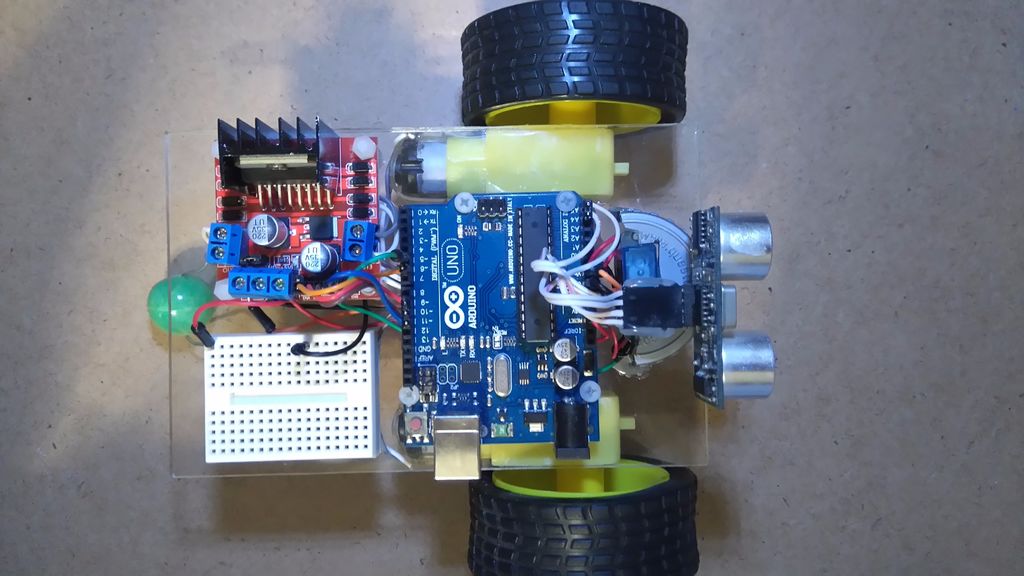
Шаг 3: Монтируем электронику
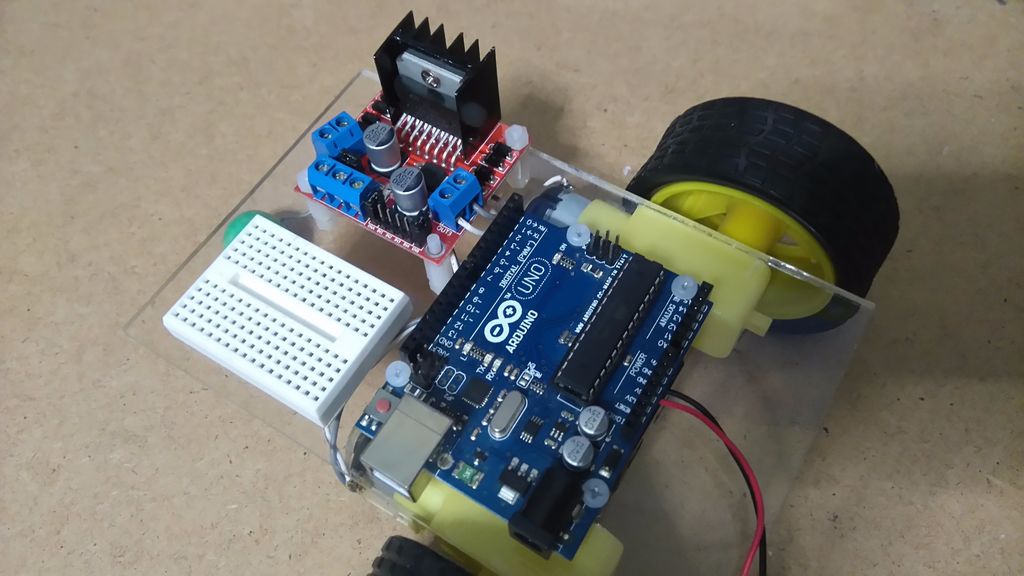

Закрепите на каркасе плату контроллера и драйвер двигателей, используя стойки для печатных плат, винты и гайки. Миниатюрная макетная плата клеится на липкий слой (уже есть на нижней стороне) (фото 1).
Теперь делаем заднее опорное колесо из скрепки и бусины (фото 2). Концы проволоки закрепите на нижней стороне каркаса суперклеем или термоклеем.
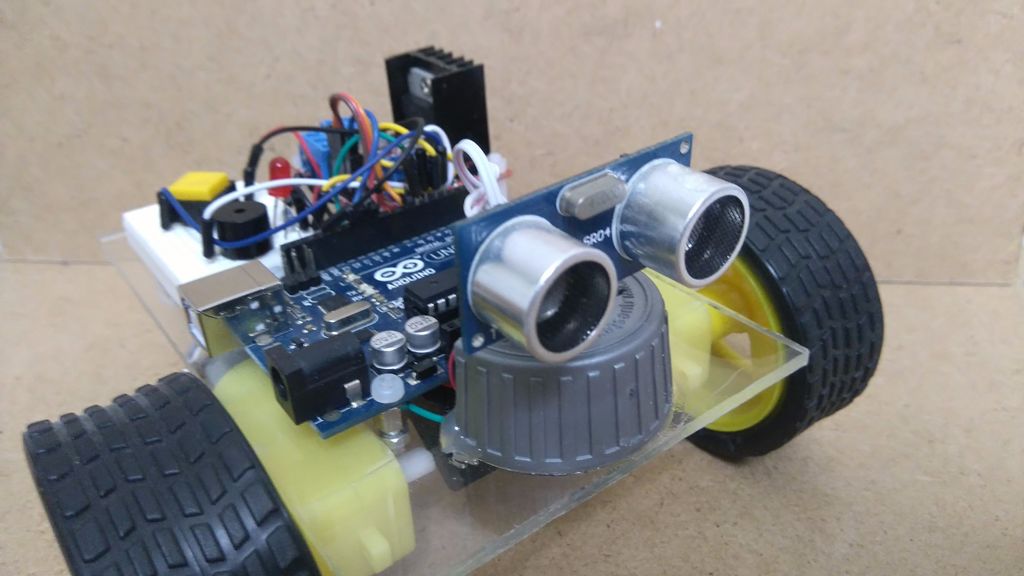
Шаг 4: Устанавливаем «глаза» робота
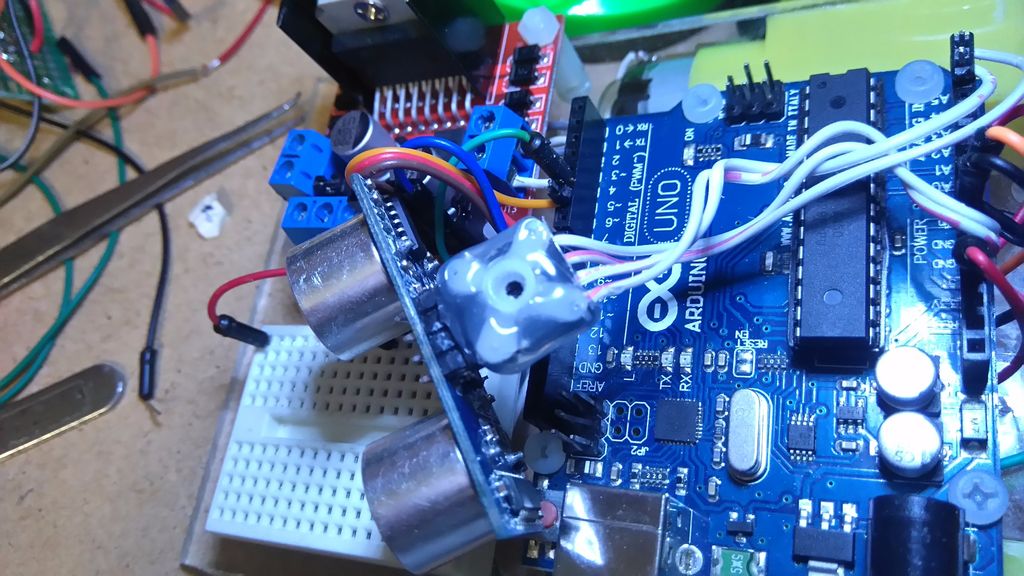
На передней части каркаса приклейте на суперклей миниатюрный сервопривод. Рассмотрите на первом фото, как крепится плата ультразвукового датчика к сервоприводу с помощью маленького вала.
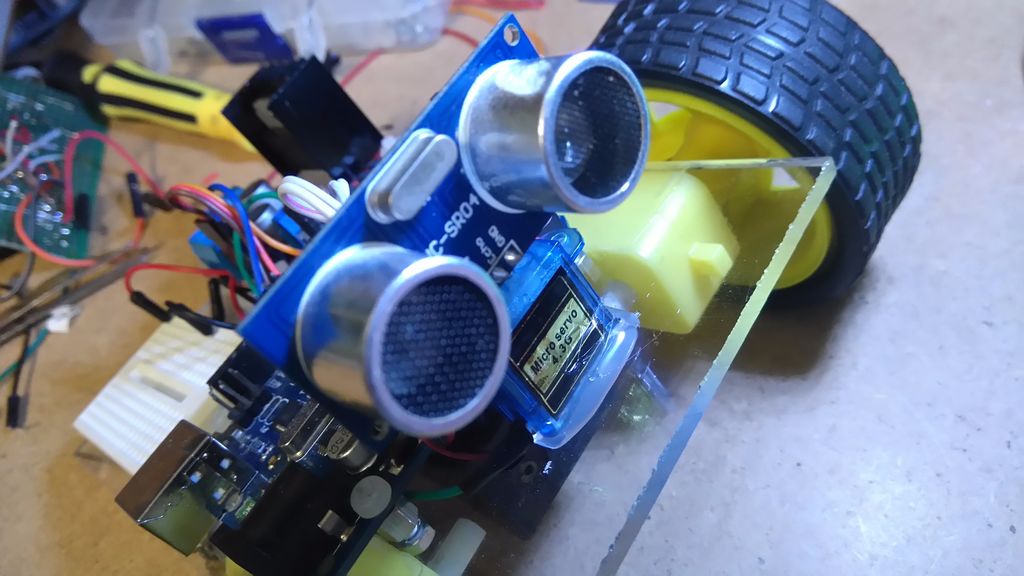
На втором фото показано, как выглядит завершенное соединение датчика и сервопривода.
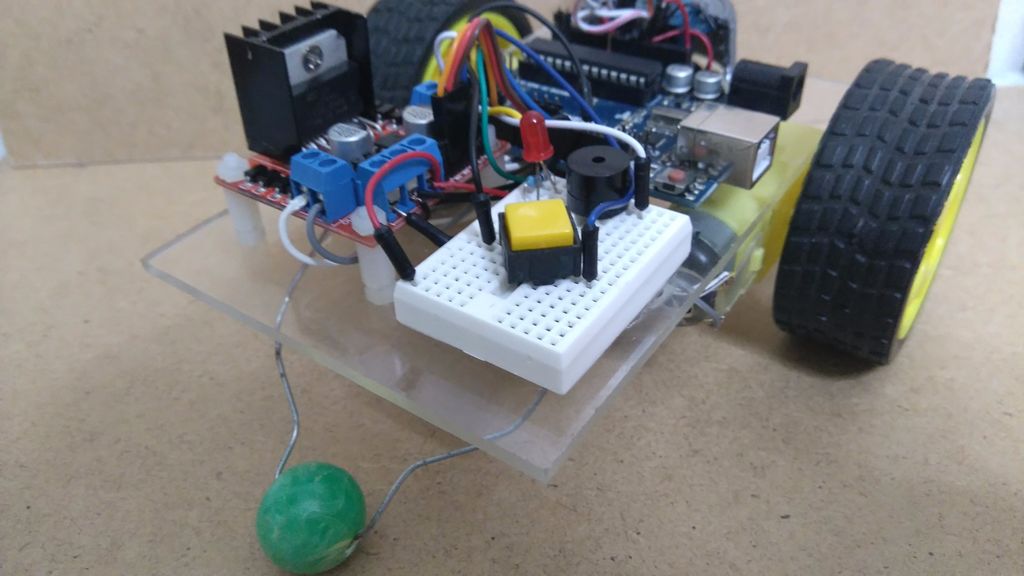
Шаг 5: Схема подключений
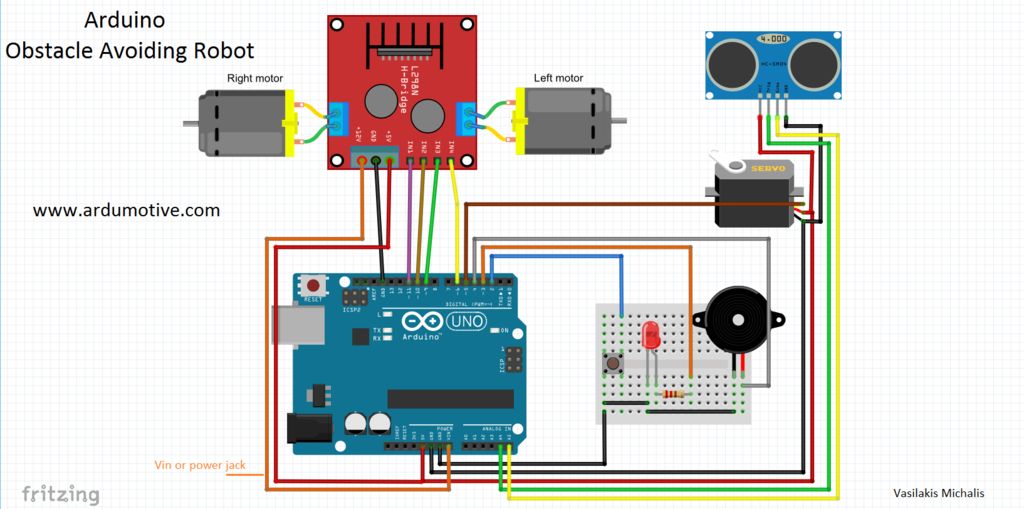
Теперь приступаем к подключению электронных компонентов. Подключение компонентов происходит согласно схеме на рисунке 1.
На макетную плату устанавливайте только диод, зуммер и кнопку, это упрощает схему и позволяет добавить дополнительные устройства в дальнейшем.
Шаг 6: Код

Код, который приведен ниже, сделан с помощью Codebender.
Codebender – это браузерный IDE, это самый простой способ программировать вашего робота из браузера. Нужно кликнуть на кнопку «Run on Arduino» и все, проще некуда.
Вставьте батарейку в отсек и нажмите на функциональную кнопку один раз, и робот начнет движение вперед. Для остановки движения нажмите на кнопку еще раз.
Нажав кнопку «Edit», вы можете редактировать скетч для своих нужд.
Например, изменив значение «10» измеряемого расстояния до препятствия в см, вы уменьшите или увеличите дистанцию, которую будет сканировать robot Arduino в поисках препятствия.
Если робот не двигается, может изменить контакты электромоторов (motorA1 и motorA2 или motorB1 и motorB2).
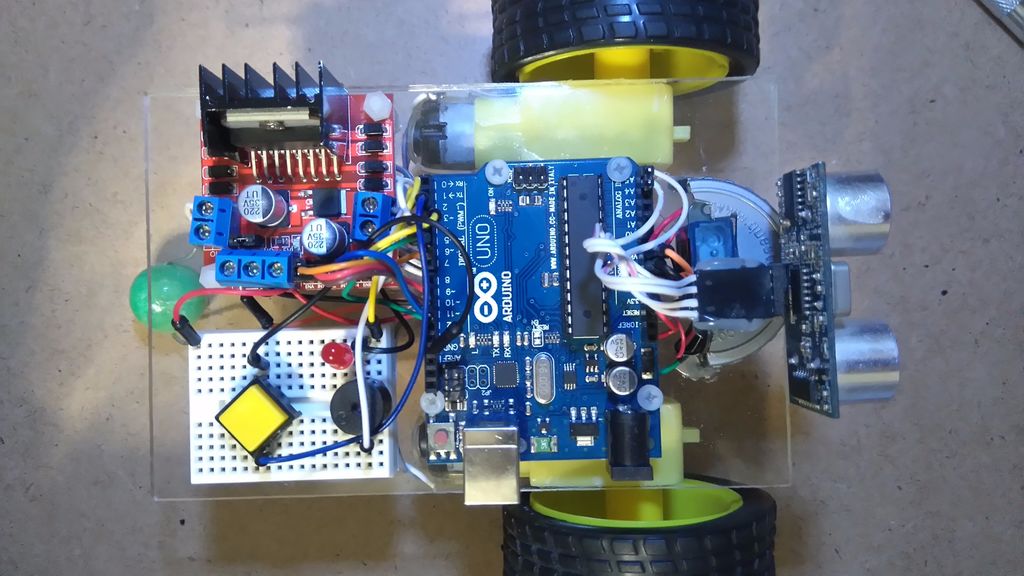
Шаг 7: Завершенный робот
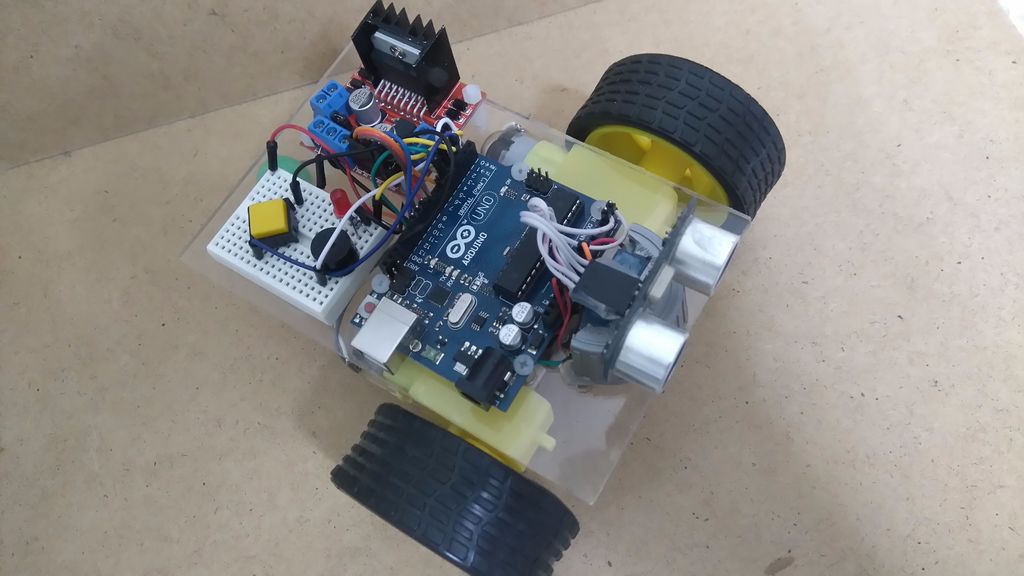
Ваш самодельный робот, обходящий препятствия, на базе микроконтроллера Arduino готов.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Объезжающий препятствия робот на Arduino
Объезжающий препятствия робот является “умным” устройством, способным автоматически обнаруживать препятствия впереди себя и избегать столкновения с ними, поворачиваясь в противоположное направление от них. Это свойство позволяет роботу работать в незнакомой обстановке и является одним из ключевых требований при создании автономных роботов. Подобные работы находят широкое применение в вооруженных силах и чрезвычайных ситуациях, а также во многих других случаях, где желательно не подвергать опасности жизнь и здоровье людей.

В этой статье мы рассмотрим создание робота на основе платы Arduino и ультразвукового датчика, способного объезжать препятствия. Ультразвуковой датчик используется для обнаружения препятствий на пути робота и расчета расстояния до них. При расстоянии до препятствия, меньшего заданной границы, робот изменяет направление и продолжает движение.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress) или Nano (купить на AliExpress).
- Ультразвуковой датчик HC-SR04 (купить на AliExpress).
- Модуль драйвера двигателя LM298N (купить на AliExpress).
- Электродвигатели постоянного тока, работающие от напряжения 5V.
- Литий-ионная батарея 7.4V (купить на AliExpress).
- Колеса.
- Шасси робота.
- Соединительные провода.
Принцип работы ультразвукового датчика HC-SR04
Ультразвуковой датчик HC-SR04 используется для измерения расстояний в диапазоне 2-400 см с точностью 3 мм. Датчик состоит из ультразвукового передатчика, ультразвукового приемника и схемы управления.

Ультразвуковой датчик HC-SR04 обеспечивает на своем выходе сигнал, пропорциональный дистанции до препятствия. Датчик генерирует звуковые колебания в ультразвуковом диапазоне (после получения управляющего импульса) и после этого ждет когда они вернутся к нему (эхо), отразившись от какого-нибудь препятствия. Затем, основываясь на скорости звука (340 м/с) и времени, необходимом для того чтобы эхо достигло источника (нашего датчика), датчик обеспечивает на своем выходе сигнал, пропорциональный расстоянию до препятствия.

Как показано на рисунке сначала нам нужно инициировать датчик для измерения расстояний, для этого на его триггерный контакт (trigger pin) необходимо подать логический сигнал высокого уровня длительностью не менее 10 мкс, после этого датчик генерирует серию звуковых колебаний и после получения отраженного сигнала (эхо) датчик обеспечивает на своем выходе сигнал, пропорциональный расстоянию между ним и препятствием.
Ультразвуковой сигнал отражается от поверхности, возвращается обратно и улавливается приемником ультразвукового сигнала датчика. После этого на контакте Echo датчика устанавливается напряжение высокого уровня (high) на время, пропорциональное расстоянию до препятствия.

После этого расстояние до препятствия можно рассчитать по следующей формуле:
Distance= (Time x Speed of Sound in Air (343 m/s))/2
Также на нашем сайте вы можете посмотреть другие проекты, в которых был использован ультразвуковой датчик.
Для изготовления робота в этом проекте были использованы компоненты, которые достаточно легко приобрести. Для изготовления шасси робота можно использовать детскую игрушку или можно купить уже готовые шасси робота на AliExpress.
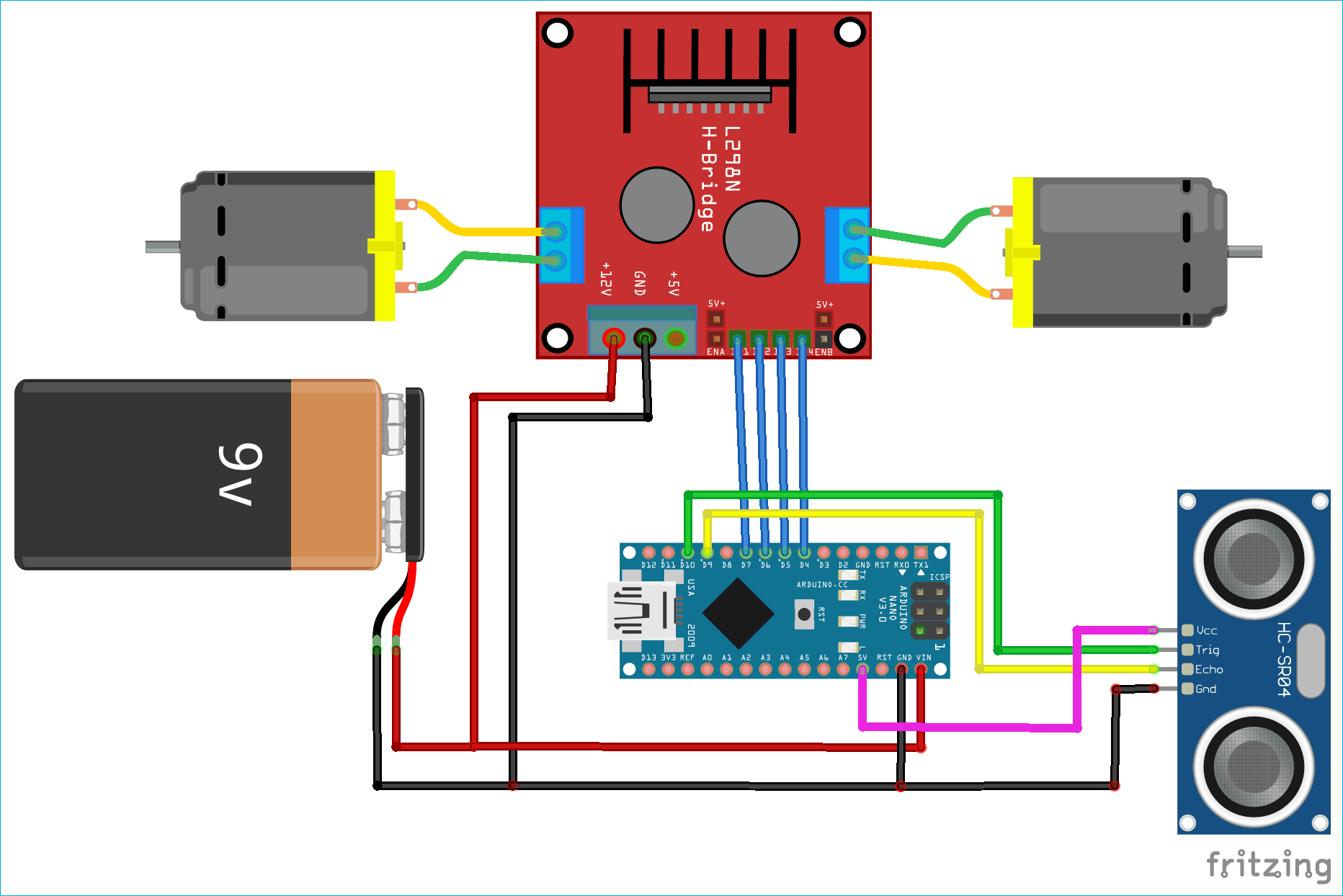
Схема проекта
Схема робота на Arduino, объезжающего препятствия, представлена на следующем рисунке. Как видите, в схеме мы использовали плату Arduino Nano, но эту же схему без изменений можно использовать и в случае использования платы Arduino Uno. Код программы в этом случае также останется без изменений.
 После сборки у нас получилась конструкция робота, показанная на следующем рисунке.
После сборки у нас получилась конструкция робота, показанная на следующем рисунке.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы рассмотрим его основные фрагменты. В программе нам необходимо взаимодействовать с датчиком HC-SR04 и подавать управляющие сигналы на контакты, с которых осуществляется управление двигателями. В этом проекте не будет использовано никаких подключаемых библиотек.
Первым делом в программе необходимо инициализировать контакты, через которые происходит взаимодействие с ультразвуковым датчиком: trig pin датчика подключен к контакту 9 платы Arduino, а echo pin — к контакту 10 платы Arduino.
Строим робота-охотника за светом
Строим робота-охотника за светом
Посмотрим, сможем ли мы сконструировать робота-охотника за светом, обладающего в некотором смысле «интеллектуальным» поведением. В главе 6 мы уже рассматривали систему слежения за источником света на фоторезисторах. Система слежения фиксировала источник света и поворачивалась в его направлении. Когда мы поместили следящую систему на копию робота-черепахи Вальтера, она направляла движение робота на источник света. Такой тип «ориентировочного» поведения мы будем называть первым уровнем системы «стимул-реакция».
Программа иллюстрирует, как алгоритмически управляемые микроконтроллеры могут имитировать функции нейронов. Для строгости примера приведем нейронную схему, которая исполняет те же функции без участия алгоритмически заданного «интеллекта».
На рис. 8.19 показано использование двойного симметричного операционного усилителя с однополярным питанием. Два ОУ включены в схемы компараторов. Работу компаратора мы подробно рассматривали в гл. 5. Если у вас возникли какие либо вопросы по поводу рис. 8.19, перечитайте гл. 5. Два фоторезистора CdS включены последовательно и образуют делитель напряжения. Выход этого фоторезистивного делителя подключен к инвертированному входу одного ОУ и неинвертированному входу другого.
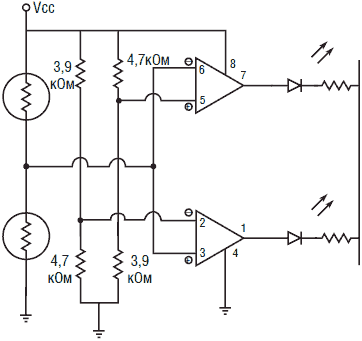
Рис. 8.19. Нейронный компаратор на двух ОУ
Потребуются еще два делителя напряжения. Конструктивно они являются зеркально симметричными. Один делитель составляют резистор 3,9 кОм, подключенный к ИП, и резистор 4,7 кОм, соединенный с землей. Во втором делителе используются резисторы тех же номиналов, но в обратном включении.
Когда оба фоторезистора освещены одинаково, то ни один из светодиодов не горит. Если прикрыть один из фоторезисторов, то соответствующий светодиод загорится.
Каждый из ОУ функционирует как одиночный электронный нейрон. Когда значение электрического стимула превышает или падает ниже заданного порога (зависит от того, какой из ОУ мы рассматриваем), который определяется соответствующим резистивным делителем 3,9 кОм и 4,7 кОм, то «нейрон» активируется. Активация нейрона (т. е. сигнал на выходе ОУ) может быть использована для включения двигателя постоянного тока через NPN транзистор (см. рис. 8.20). В свою очередь двигатели могут обеспечивать перемещение и направление движения робота охотника.
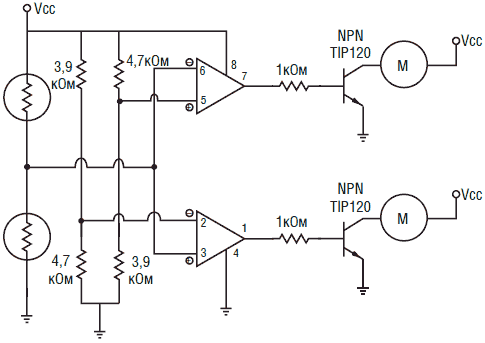
Рис. 8.20. Управление двигателями постоянного тока с помощью нейронного компаратора
Для изготовления простого робота-охотника было использовано шасси, имеющее два двигателя постоянного тока с редукторами (см. рис. 8.21). Когда оба двигателя включены, робот движется вперед по прямой. Если один из двигателей выключен, то другой двигатель поворачивает конструкцию направо или налево.
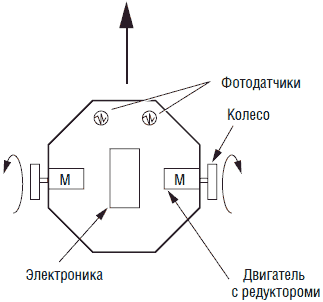
Рис. 8.21. Общая схема робота – светоохотника
Для нашего робота-охотника при одинаковом освещении фоторезисторов нам необходимо подавать питание на оба двигателя. Для этого между выходом каждого из ОУ и базой NPN транзистора необходимо включить инвертирующий буферный каскад (см. рис. 8.22).
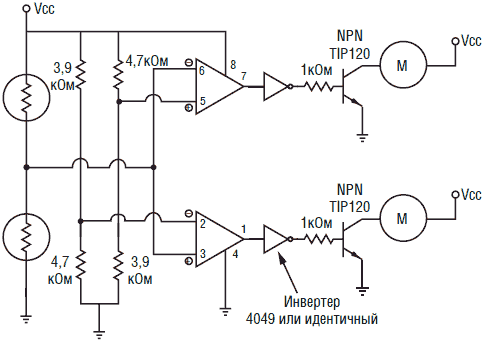
Рис. 8.22. Управление двигателями постоянного тока с помощью нейронных компараторов с инверторами
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРес
Читайте также
Строим солнечный двигатель
Строим солнечный двигатель Солнечный двигатель часто используется в качестве бортового источника тока, применяемого в BEAM-роботах, которых часто называют «живущими» роботами (см. обсуждение BEAM-роботов в главе 8). Свое распространение солнечные двигатели получили
Изготовление робота-тестера
Изготовление робота-тестера Я назвал конструкцию этого небольшого устройства роботом-тестером. В основе ее лежит небольшой электрический автомобиль, который можно приобрести менее чем за $10 (см. рис. 5.47). Рис. 5.47. ТестерПринципиальная схема робота-тестера изображена на
Усовершенствование робота-тестера
Усовершенствование робота-тестера Когда я разрабатывал конструкцию робота-тестера, то предполагал что большинство проверяемых датчиков будет использовано в конструкциях миниатюрных моделей. Однако вышло по-другому. В процессе конструирования различных
Рука робота, управляемая УРР
Рука робота, управляемая УРР В гл. 15 будет рассмотрен еще один вариант интерфейса, управляющий рукой
Строим черепаху Вальтера
Строим черепаху Вальтера Мы можем воспроизвести большинство функций знаменитой черепахи Вальтера. Используемая нами программа имитирует работу нейронов, использованных в оригинальной конструкции. Для изготовления шасси потребуются некоторые слесарные работы.
Список компонентов для робота-черепахи Вальтера
Список компонентов для робота-черепахи Вальтера • (1) 300×300 мм лист металла толщиной 0,4–0,6 мм• (1) 3х 12х 300 мм алюминиевая полоса• (1) сервомотор с крутящим моментом 1,3 кгс• (1) двигатель с редуктором 1:100• винты и гайки 3 мм• винты и гайки 2 мм• (1) 3х 12х 810 мм алюминиевая
Список деталей робота – устройства телеслежения
Список деталей робота – устройства телеслежения • (1) Миниатюрная цветная видеокамера с приемником и передатчиком диапазона 2,4 ГГц• (1) Дополнительный батарейный отсек• (1) Система пропорционального радиоуправления (приемник/передатчик – два канала, кварцевые
Создание шагающего робота
Создание шагающего робота Существует много моделей небольших заводных шагающих игрушек. Такие игрушечные «пешеходы» передвигают ногами вверх-вниз и вперед-назад с помощью кулачковых механизмов. Хотя такие конструкции вполне способны «шагать», а некоторые делают это
Конструкция робота
Конструкция робота За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование
Список деталей конструкции шагающего робота
Список деталей конструкции шагающего робота • Сервомоторы• Микроконтроллеры 16F84• Алюминиевые полосы• Алюминиевый лист• Прутки и гайки с резьбой 3 мм• Пластиковые винты, гайки и шайбыДетали можно заказать в:Images Company39 Seneca LoopStaten Island, NY 10314(718)
Конструкция робота
Конструкция робота Первым делом нужно обратить внимание на корпус устройства. Он должен быть прозрачным и иметь достаточные размеры для размещения редуктора и электрических схем. В прототипе был использован сферический корпус диаметром 140 мм. Стыкующиеся из половин
Список деталей для изготовления робота-солнечного шара
Список деталей для изготовления робота-солнечного шара • (1) Прозрачная пластиковая сфера 140 мм (см. выше текст настоящей главы).• (1) Редуктор (см. выше текст настоящей главы)• (1) Стержень из твердого пластика длиной 150 мм диаметром 12 мм• (1) Пластиковая трубка длиной 75 мм,
Список деталей для робота-рыбы
Список деталей для робота-рыбы • R1 33 кОм• R2 и R6 100 Ом• R3 470 Ом• R5 10 кОм• R7 15 кОм• Q2 транзистор NPN 2N2222• Q3 TIP 120 NPN Darlington• IC1 таймер 555• C1 и C2 22 мкФ• С3 0,01 мкФ• Кольцевой соленоид $5,95• Q1 2N2646 UJT $5,95• Алюминиевая полоса 3х12х150 мм• Алюминиевая полоса 3х30х50 ммДетали можно заказать
Обучение робота
Обучение робота Робот действует по программе. Вначале изучают траекторию движения руки робота, затем «обучают» его самого и составляют программу самостоятельной работы. Кратко рассмотрим этапы обучения.Перемещения, которые должна совершить рука робота, фиксируют при
Внутренний мир робота
Внутренний мир робота Чтобы выполнить план своих действий, роботу нужно прежде всего иметь представление о внешнем мире. Если бы окружающая среда была статичной, было бы легко принимать решения и выполнять план своих действий. Однако она беспрерывно изменяется. В ней