- Судовые эхолоты. Принцип измерения глубин. Источники погрешностей и учет их в судовождении. Эксплуатационные проверки.
- Принцип работы эхолота
- Как работает эхолот
- ⛵ Возможности эхолота
- Хороший эхолот обладает четырьмя важными характеристиками:
- 🚤 Частота импульсов
- 🐠 Как формируется дуга рыбы
- Исследование состояния воды и дна
- Каким образом определяется плотность и структура дна?
- ⚓ Изображение объектов в воде, поиск рыбы.
- 🐳 Виды эхолотов.
- Технологии обработки и изображения эхо-сигнала.
- 🚤 Как ведет себя эхолот на скорости.
- Использование эхолота на зимней рыбалке.
- Что может отобразить эхолот на зимней рыбалке?
- На что стоит обратить внимание при выборе зимнего эхолота:
- Эхолоты Smartcast
Судовые эхолоты. Принцип измерения глубин. Источники погрешностей и учет их в судовождении. Эксплуатационные проверки.
Принцип работы современных эхолотов основан на измерении времени прохождения в воде импульса ультразвуковых колебаний от судна до дна моря и обратно.
Гидроакустические антенны эхолотов подразделяются на пьезоэлектрические и магнитострикционные. Пьезоэлектрические антенны имеют КПД до 0,6—0,7 и позволяют преобразовывать колебания частотой до сотен килогерц. Магнитострикционные антенны имеют КПД порядка 0,3—0,5 и удовлетворительно работают на частотах до 30—40 кГц.
Рабочая частота эхолота, длительность импульсов и их скважность выбираются с учетом измеряемой глубины, затухания акустических колебаний в воде, акустических шумов, создаваемых судном, диаграммы направленности вибраторов и их размеров. В эхолотах последних разработок используется импульсный способ возбуждения, обеспечивающий большую точность измерения малых глубин.
В целях безопасности мореплавания последние навигационные эхолоты включают устройство, сигнализирующее о выходе судна на заданную глубину.
Эхолот НЭЛ-М2 устанавливают на крупнотоннажных судах; эхолот НЭЛ-М3Б — на судах всех классов, включая быстроходные катера, взрывоопасные суда и ледоколы. Он рассматривается в настоящее время как основной эхолот для судов Минморфлота.
Эхолот НЭЛ-М2 в отличие от эхолота НЭЛ-М3Б и всех предшествующих навигационных эхолотов является двухчастотным, т. е. имеет две рабочие частоты — 12 кГц и 169 кГц. Частота 169 кГц используется для измерения глубин до 400 м, частота 12 кГц — для измерения глубин от 400 до 3000 м. Переход с одной частоты на другую происходит автоматически с переключением диапазонов измерения.
Самописец, цифровой указатель и прибор сигнализации о выходе судна на заданную глубину могут подключаться в эхолотах НЭЛ-М2 и НЭЛ-МЗБ в, любом сочетании.
На частоте 169 кГц к эхолоту может быть подключено до четырех гидроакустических антенн: одна — в носу, вторая — в корме и остальные две — по бортам в средней части судна. Использование четырех антенн позволяет более полно контролировать малые глубины под днищем крупнотоннажных судов. Антенна, с которой поступает сигнал, выбирается в этом случае по желанию штурмана и подключается им вручную.
Погрешности эхолотов. Они возникают при отклонении действительной скорости распространения звука от расчетной. Скорость распространения звука в морской воде зависит от температуры, солености и гидростатического давления. При повышении температуры на1° скорость уменьшается на 4 м/с, при увеличении солености на 1% возрастает на 1 м/с, при увеличении глубины на 10 м повышается на 0,2 м/с. Значение поправки к измеренной глубине DH за счет отклонения действительной скорости звука oт расчетной
 ,
,
где со— расчетная скорость звука;
с—фактическая скорость звука. Поправка DH положительна, если с>со, и отрицательна, если с
Влияние структуры грунта. Наиболее четкая индикация получается при твердом грунте (каменная плита, плотный песок и т. п.). Однако в отдельных случаях при малых глубинах индикация от каменной плиты может пропадать ввиду зеркального отражения эхо-импульса и непопадания его на вибратор-приемник.
При илистом грунте индикации от верхней границы ила может не быть, а появится индикация от подстилающего твердого грунта. Может появиться и двойная индикация: от верхней границы ила и от подстилающего грунта. Двойная индикация хорошо просматривается на самописце.
Рекомендации по эксплуатации. При неизвестной глубине под килем измерения следует начинать с большего диапазона глубин. При измерении малых глубин (менее 10—15 м) необходимо включать гашение нулевой помехи и учитывать поправку на базу.
Дата добавления: 2015-02-05 ; просмотров: 5268 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Принцип работы эхолота
В настоящее время наиболее совершенными средствами измерения глубин являются эхолоты, которые обеспечивают полную автоматизацию промеров. Определение глубин с помощью эхолотов основано на измерении промежутка времени между моментом посылки ультразвукового сигнала по направлению ко дну и моментом возвращения отраженного от дна эхо-сигнала. По физической природе звук (ультразвук) представляет собой механические колебания частиц упругой среды, источником которых является помещенное в водную среду колеблющееся твердое тело. Колеблясь, источник звука вызывает периодическое сжатие и растяжение прилегающих слоев. Благодаря взаимодействию соседних элементов среды, упругие деформации передаются от одного участка к другому. В результате в водной среде образуются области сгущений и разряжений, которые последовательно удаляются от источника колебаний. Этот процесс называется распространением акустической волны.
Прием и излучение ультразвуковых сигналов у эхолотов производится акустическими антеннами. Основной частью ультразвуковых антенн являются электроакустические преобразователи (вибраторы), в которых происходит преобразование электрической энергии в механическую и наоборот. Поверхность вибратора находится в соприкосновении с водной средой. В режиме излучения сигнала под действием переменного магнитного или электрического поля поверхность вибратора приходит в состояние колебания, передаваемого водной среде. В режиме приема поверхность вибратора под действием отраженной звуковой волны начинает совершать механические колебания, преобразуемые в электрический сигнал. В настоящее время применяются акустические преобразователи, обладающие магнитострикционным или пьезоэлектрическим эффектом.
Явление изменения линейных размеров ферромагнитных тел (железо, никель, кобальт) при изменении напряженности пронизывающего их магнитного поля или изменение магнитного состояния этих тел вследствие их деформации под действием механических сил называется магнитострикцией.
Прямым магнитострикционным эффектом называется явление изменения линейных размеров ферромагнетиков при помещении их в переменное магнитное поле. Прямой эффект используется в передающих антеннах.
Изменение напряженности магнитного поля, создаваемого поляризованным (намагниченным) ферромагнетиком вследствие изменения его линейных размеров под действием внешних сил, называется обратным магнитострикционным эффектом. Обратный эффект используется в приемных антеннах.
Конструктивно магнитострикционный преобразователь представляет собой пакет никелевых пластин, который охватывает катушка (обмотка). В передающих антеннах для создания переменного магнитного поля в пакете пластин через катушку пропускают переменный ток. Находясь в переменном магнитном поле, предварительно намагниченные пластины изменяют свою длину с той же частотой, с которой меняется магнитное поле. Механические колебания вибратора передаются водной среде, что приводит к излучению ультразвукового сигнала.
В приемных антеннах с обмотки снимают электрический сигнал, наводимый переменным магнитным полем, возникающим при деформациях пакета пластин. Отразившийся от дна ультразвуковой сигнал воздействует на предварительно намагниченный пакет никелевых пластин и изменяет его продольные размеры. В результате механических колебаний вибратора возникает магнитное поле, которое наводит электрический импульс в охватывающей пакет обмотке.
Пакет вибратора-излучателя и вибратора-приемника располагают в одном водонепроницаемом корпусе – обтекателе забортного устройства. Забортное устройство снабжено приспособлением для крепления его к борту судна при выполнении промеров глубин. При этом обтекатель забортного устройства устанавливают параллельно поверхности воды. Его нижняя плоскость должна быть заглублена не менее чем на 0,3 м.
Действие пьезоэлектрических преобразователей основано на пьезоэффекте, которым обладают некоторые естественные и искусственные кристаллы. В настоящее время в качестве пьезоэлектрического материала используется керамика титаната бария или цирконата титаната свинца.
Прямым пьезоэлектрическим эффектом называется явление, состоящее в том, что при деформациях сжатия или растяжения поляризованного кристалла, на его поверхности появляются электрические заряды. Этот эффект используется в вибраторах-приемниках.
Обратный пьезоэлектрический эффект заключается в том, что кристалл, помещенный в электрическое поле, будет изменять свои линейные размеры с частотой изменения электрического поля. Это свойство используется в излучающих антеннах.
Поскольку пьезоэлектрические преобразователи обычно обладают и прямым и обратным пьезоэффектом, то у многих эхолотов для излучения и приема ультразвука используется одна и та же антенна.
Принцип определения глубины с помощью эхолота заключается в измерении промежутка времени Dt между посылкой ультразвукового импульса и приходом отраженного от дна эхо-сигнала. Считая скорость распространения ультразвука в воде C0 постоянной, глубина h определится по формуле:  . При температуре воды 15°C скорость распространения ультразвука составляет ≈1465 м/с.
. При температуре воды 15°C скорость распространения ультразвука составляет ≈1465 м/с.
Структурная схема эхолота представлена на рис. 20. Блок управления БУ предназначен для включения, настройки, регулировки эхолота и контроля за его работой.
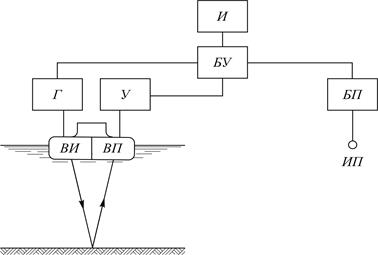
Рис. 20. Структурная схема эхолота
Блок питания БП служит для преобразования постоянного тока источника питания ИП (аккумулятор или судовая сеть) в переменный ток с последующим его выпрямлением в постоянные токи различных напряжений для питания электрических цепей эхолота.
Генератор Г вырабатывает электрические импульсы заданной частоты и подает их на электроакустический преобразователь (вибратор-излучатель ВИ), который излучает ультразвуковой сигнал в водную среду.
Отраженный от дна эхо-сигнал поступает на вибратор-приемник ВП, где преобразуется в электрический сигнал, который после усиления в усилителе У поступает на индикатор И. Индикатор И принимает сигналы, фиксирует их и управляет посылкой следующих импульсов генератором.
По способу определения промежутка времени  эхолоты подразделяются на приборы с электромеханической разверткой времени и с электронной разверткой времени. Существуют также комбинированные эхолоты, использующие оба принципа развертки времени.
эхолоты подразделяются на приборы с электромеханической разверткой времени и с электронной разверткой времени. Существуют также комбинированные эхолоты, использующие оба принципа развертки времени.
Электромеханическая развертка времени реализуется в электромеханических самописцах. Электронная – в цифровых указателях глубин, использующих либо цифровой индикатор, либо электронный самописец (жидкокристаллический дисплей) с блоком памяти, либо их комбинацию.
Как работает эхолот
В самых простых словах: электрический  импульс от передатчика преобразуется в звуковую волну в датчике(трансдьюсер) и передается в воду. Когда волна попадает на объект (рыбу, дно, дерево и т.д.) она отражается. Отраженная волна снова попадает в преобразователь, где она трансформируется в электрический сигнал, обрабатывается по заданному алгоритму, и посылается на дисплей. Так как скорость звука в воде постоянна (приблизительно 1440 метров в секунду), промежуток времени между отправкой сигнала и получением эха может быть измерен и по этим данным расстояние до объекта может быть определено. Этот процесс повторяется многократно в течение секунды. Наиболее часто используемая частота волны составляет 200 кГц, также иногда производятся приборы на частоте 83 кГц. Хотя эти частоты находятся в диапазоне ближе к звуковым частотам, они неслышны ни людям, ни рыбе. Как упомянуто ранее, эхолот посылает и принимает сигналы, затем «печатает» эхо на дисплей. Так как это случается много раз в секунду, непрерывная линия идущая поперек дисплея, показывает рисунок дна. Кроме того, на экране отображается сигнал, возвращенный от любого объекта в воде между поверхностью и дном. Зная скорость звука в воде и время, которое требуется для возвращения эха, прибор может показывать глубину и нахождение любой рыбы в воде.
импульс от передатчика преобразуется в звуковую волну в датчике(трансдьюсер) и передается в воду. Когда волна попадает на объект (рыбу, дно, дерево и т.д.) она отражается. Отраженная волна снова попадает в преобразователь, где она трансформируется в электрический сигнал, обрабатывается по заданному алгоритму, и посылается на дисплей. Так как скорость звука в воде постоянна (приблизительно 1440 метров в секунду), промежуток времени между отправкой сигнала и получением эха может быть измерен и по этим данным расстояние до объекта может быть определено. Этот процесс повторяется многократно в течение секунды. Наиболее часто используемая частота волны составляет 200 кГц, также иногда производятся приборы на частоте 83 кГц. Хотя эти частоты находятся в диапазоне ближе к звуковым частотам, они неслышны ни людям, ни рыбе. Как упомянуто ранее, эхолот посылает и принимает сигналы, затем «печатает» эхо на дисплей. Так как это случается много раз в секунду, непрерывная линия идущая поперек дисплея, показывает рисунок дна. Кроме того, на экране отображается сигнал, возвращенный от любого объекта в воде между поверхностью и дном. Зная скорость звука в воде и время, которое требуется для возвращения эха, прибор может показывать глубину и нахождение любой рыбы в воде.
⛵ Возможности эхолота
Хороший эхолот обладает четырьмя важными характеристиками:
1) Мощный передатчик.
2) Эффективный преобразователь (датчик).
3) Чувствительный приемник.
4) Дисплей высокого разрешения. 
Все части этой системы должны быть разработаны так, чтобы работать вместе, при любых погодных условиях и критических температурах. Высокая мощность передатчика увеличивает вероятность, что Вы получите эхо на глубоководье или в плохих водных условиях. Это также позволяет Вам видеть мелкие подробности, типа мальков и мелкой структуры дна. Преобразователь не должен только проводить мощный сигнал от передатчика, он также должен преобразовать электрический сигнал в звуковую энергию с наименьшей потерей в мощности сигнала. С другой стороны, он должен чувствовать самое малое эхо от малька или сигнал дна с глубоководья. Приемник имеет дело с чрезвычайно широким диапазоном сигналов. Он должен отличить максимально сильный передаваемый сигнал и слабое эхо, пришедшее от преобразователя. Кроме того, он должен различить объекты находящиеся близко друг к другу, превратив их в разные импульсы для дисплея. Дисплей должен иметь высокое разрешение (вертикальные пиксели) и хороший контраст, чтобы показывать подводный мир детально и четко. Это позволяет видеть мелкую рыбу и подробности дна.
🚤 Частота импульсов
Большинство современных  эхолотов оперирует на частоте 200 кГц, некоторые используют 83 кГц. Есть свои преимущества у каждой частоты, но почти для всех состояний пресной воды и большинства состояний соленой воды, 200 кГц — лучший выбор. Эта частота дает лучшие подробности, работает лучше всего в неглубокой воде и на скорости, и обычно дает меньшее количество «шумовых» и нежелательных отражений. Определение близлежащих подводных объектов, также лучше на частоте 200 кГц. Это способность отобразить две рыбы как два отдельных эха вместо одной «капли» на экране.
эхолотов оперирует на частоте 200 кГц, некоторые используют 83 кГц. Есть свои преимущества у каждой частоты, но почти для всех состояний пресной воды и большинства состояний соленой воды, 200 кГц — лучший выбор. Эта частота дает лучшие подробности, работает лучше всего в неглубокой воде и на скорости, и обычно дает меньшее количество «шумовых» и нежелательных отражений. Определение близлежащих подводных объектов, также лучше на частоте 200 кГц. Это способность отобразить две рыбы как два отдельных эха вместо одной «капли» на экране.
Существуют некоторые условия, при которых частота 83 кГц лучше. Как правило, эхолоты, работающие на частоте 83 кГц (при тех же самых условиях и мощности) может проникать более глубоко через воду. Это происходит из-за естественной способности воды поглощать звуковые волны. Скорость поглощения больше для более высоких частот звука, чем для более низких частот. Поэтому 83 кГц эхолоты находят использование в более глубокой соленой воде. Также, преобразователи 83 кГц эхолотов имеют более широкие углы обзора, чем преобразователи 200 кГц эхолотов.
Пример: различие между 200 кГц и 83 кГц:
| 200 kHz | 83 kHz |
| Малые глубины | Большие глубины |
| Узкий конический угол | Широкий конический угол |
| Лучшее определение и разделение целей | Худшее определение и разделение целей |
| Меньшая чувствительность к помехам | Большая чувствительность к помехам |
🐠 Как формируется дуга рыбы
Причина, по которой рыба отображается, как дуга на экране эхолота заключается в относительном движении между рыбой и  коническим углом преобразователя при проходе лодки над рыбой. Длина дуги на экране, от одного ее конца до другого — не имеет к размеру рыбы никакого отношения, а всего лишь обозначает время нахождения рыбы в конусе излучаемого акустического сигнала. Как только ведущая кромка конуса попадает на рыбу, пиксель отображается на экране эхолота. Поскольку лодка движется над рыбой, расстояние до нее уменьшается. Это ведет к тому, что каждый следующий пиксель отображается на экране выше предыдущего. Когда центр конуса находится непосредственно над рыбой, первая половина дуги сформирована. Это место — кратчайшее расстояние до рыбы. Так как рыба ближе к лодке, сигнал более сильный, и эта часть дуги самая толстая. Когда лодка уходит от рыбы, расстояние увеличивается и пиксели появляются более глубоко, пока рыба не уйдет из конуса. Если рыба не проходит непосредственно через центр конуса, дуга не будет отображена. Так как рыба находится в конусе не очень долго, не так много пикселей отображают ее на экране, а те что есть, более слабые. Это одна из причин, по которые трудно показать дуги рыбы у поверхности воды. Конический угол слишком узкий для получения дуги.
коническим углом преобразователя при проходе лодки над рыбой. Длина дуги на экране, от одного ее конца до другого — не имеет к размеру рыбы никакого отношения, а всего лишь обозначает время нахождения рыбы в конусе излучаемого акустического сигнала. Как только ведущая кромка конуса попадает на рыбу, пиксель отображается на экране эхолота. Поскольку лодка движется над рыбой, расстояние до нее уменьшается. Это ведет к тому, что каждый следующий пиксель отображается на экране выше предыдущего. Когда центр конуса находится непосредственно над рыбой, первая половина дуги сформирована. Это место — кратчайшее расстояние до рыбы. Так как рыба ближе к лодке, сигнал более сильный, и эта часть дуги самая толстая. Когда лодка уходит от рыбы, расстояние увеличивается и пиксели появляются более глубоко, пока рыба не уйдет из конуса. Если рыба не проходит непосредственно через центр конуса, дуга не будет отображена. Так как рыба находится в конусе не очень долго, не так много пикселей отображают ее на экране, а те что есть, более слабые. Это одна из причин, по которые трудно показать дуги рыбы у поверхности воды. Конический угол слишком узкий для получения дуги.
Это интересно: Рыбы создают одни из наиболее интересных и удивительных эхо-сигналов, какие только бывают. Вы наверняка слышали, что от плавательного пузыря в теле рыбы отражается эхо-сигнал, который в виде метки виден на экране эхолота. Это, правда, поскольку так и есть, но многие виды рыб не имеют плавательного пузыря, и, тем не менее, они также видны на экране эхолота! Как и мы, рыбы в основном состоят из воды, так что от эха было бы мало пользы. Но на теле рыбы есть чешуя, скелет и другие части тела, плотность которых больше плотности воды. Хотя от плавательного пузыря звуковой импульс отражается, наверное, лучше всего, но другие части тела рыбы также вполне способны стать причиной эхо-сигнала.
Помните, необходимо движение между лодкой и рыбой, чтобы была видна дуга. Для этого необходимо двигаться на медленной скорости. Если Вы остановились, то рыбы не будут отображаться арками. Вместо этого они будут видны как горизонтальные строки, поскольку они плавают внутри конуса преобразователя.
Исследование состояния воды и дна
Под этими словами подразумевается получение  данных об особенностях состояния воды и плотности дна, а
данных об особенностях состояния воды и плотности дна, а  также получение данных о температуре воды. Для определения температуры используются специальные датчики, которые могут поставляться отдельно, а могут быть совмещены с преобразователем, то есть основным датчиком эхолота. К большинству эхолотов подключается датчик измерения скорости. Обычно он используется для измерения скорости лодки относительно воды, для определения оптимальной скорости для рыбалки, допустим, при ловле на «дорожку». Также для рыбаков полезными будут данные о скорости течения воды при стоянке на якоре. Анализируя полученные данные о скорости движения лодки, можно получить информацию о пройденном пути. При детальном анализе информации, полученной при помощи эхолота, можно определить, где находится термоклин — слой воды с низким содержанием кислорода, который образуется в стоячей воде при высоких температурах.
также получение данных о температуре воды. Для определения температуры используются специальные датчики, которые могут поставляться отдельно, а могут быть совмещены с преобразователем, то есть основным датчиком эхолота. К большинству эхолотов подключается датчик измерения скорости. Обычно он используется для измерения скорости лодки относительно воды, для определения оптимальной скорости для рыбалки, допустим, при ловле на «дорожку». Также для рыбаков полезными будут данные о скорости течения воды при стоянке на якоре. Анализируя полученные данные о скорости движения лодки, можно получить информацию о пройденном пути. При детальном анализе информации, полученной при помощи эхолота, можно определить, где находится термоклин — слой воды с низким содержанием кислорода, который образуется в стоячей воде при высоких температурах.
Каким образом определяется плотность и структура дна?
Это вторая, пожалуй, самая важная функция эхолота, позволяющая получать изображение контура дна — бровки, бугры и прочие изменения рельефа, представляющие интерес при поиске рыбы. Одной из ошибок рыболовов является представление, что на экране эхолота изображён тот участок, что охвачен лучом в момент времени, когда мы смотрим на экран. Но «картинка» на экране это всего лишь развёрнутая во времени история прохождения луча и её вполне можно сравнить с изображением луча на экране осциллографа — луч эхолота отражает на дисплее события во временном масштабе. Чем позже произошло событие, тем его изображение ближе к левому краю дисплея. Понятно, что событием в данном случае мы называем фрагмент изображения. Ряд событий и есть «картинка» на экране — прорисовка линии дна, объектов в воде, изображение изменения плотности воды (термоклин) и т.д. Сигнал луча эхолота по-разному отражается с разных видов донной поверхности. Например, сигнал, отраженный от илистого дна будет более рассеянный, нежели аналогичный сигнал, отраженный от жесткой поверхности. Поэтому илистое дно будет выглядеть на экране эхолота размытым и нечетким. А если дно жесткое, то на дисплее оно будет отображено насыщенным темным цветом без размытых краев.
⚓ Изображение объектов в воде, поиск рыбы.
Как бы парадоксально это ни звучало, но отображение символов рыбы на экране — это, скорее,  второстепенная функция эхолота. Человек, увлекающийся рыбной ловлей, без проблем проанализирует данные эхолота, такие, как температура воды, глубина и структура дна, и на основе этих данных сделает вывод о возможном наличии рыбы на том или ином участке водоема. Когда на экране появляется графический символ рыбы или дуга, это значит, что луч эхолота несколько секунд назад прошел над местом, где он обнаружил объект, распознанный им, как рыба. При этом для того, чтобы эхолот просигнализировал о возможном наличии рыбы необходимо, чтобы она попала в центр луча. Мы уже говорили о том, что изображение экрана — это отображение происходящего под водой с учетом временной проекции. Аналогичная ситуация происходит во время обнаружения рыбы. Наиболее четкое изображение рыбы появляется на экране, когда рыба находится в центре луча. При этом не будем забывать, что и лодка, и рыба не стоят на месте, а движутся относительно друг друга. Если лодка идет на большой скорости на мелководье, а луч эхолота узкий, то шанс того, что эхолот зафиксирует появление рыбы в луче, крайне невелик. Да и к тому же, вряд ли рыба будет и дальше оставаться на месте, заметив лодку. На большой скорости также возможно появление на экране эхолота непрерывной черты, что говорит о том, что эхолот не успевает обрабатывать данные, полученные на такой скорости. Для того,
второстепенная функция эхолота. Человек, увлекающийся рыбной ловлей, без проблем проанализирует данные эхолота, такие, как температура воды, глубина и структура дна, и на основе этих данных сделает вывод о возможном наличии рыбы на том или ином участке водоема. Когда на экране появляется графический символ рыбы или дуга, это значит, что луч эхолота несколько секунд назад прошел над местом, где он обнаружил объект, распознанный им, как рыба. При этом для того, чтобы эхолот просигнализировал о возможном наличии рыбы необходимо, чтобы она попала в центр луча. Мы уже говорили о том, что изображение экрана — это отображение происходящего под водой с учетом временной проекции. Аналогичная ситуация происходит во время обнаружения рыбы. Наиболее четкое изображение рыбы появляется на экране, когда рыба находится в центре луча. При этом не будем забывать, что и лодка, и рыба не стоят на месте, а движутся относительно друг друга. Если лодка идет на большой скорости на мелководье, а луч эхолота узкий, то шанс того, что эхолот зафиксирует появление рыбы в луче, крайне невелик. Да и к тому же, вряд ли рыба будет и дальше оставаться на месте, заметив лодку. На большой скорости также возможно появление на экране эхолота непрерывной черты, что говорит о том, что эхолот не успевает обрабатывать данные, полученные на такой скорости. Для того,  чтобы информация о наличии рыбы, которая отображается на экране и реальность максимально совпадали, необходимо настроить чувствительность эхолота и скорость прокрутки экрана. Оптимальные значения для этих параметров устанавливаются исключительно опытным путем. Также желательно установить режим увеличения исследуемого участка (ZOOM). В этом случае информация на экране будет наиболее приближенной к действительности. Когда все параметры эхолота выставлены верно, мы увидим на дисплее дугу или символ рыбы. Значит ли это, что под лодкой действительно находится рыба? С вероятностью 80%- да. Однако бывает и так, что символом рыбы отображается проплывающая под водой коряга или иной предмет, очертаниями похожий на рыбу. Как в этом случае определить, действительно ли в поле луча эхолота попала рыба, а не посторонний предмет? Эхолот дает нам пищу для размышлений, а выводы мы делаем сами, основываясь на знаниях о повадках рыб и местах их обитания. Например, дуга возле донной коряги на глубине может оказаться судаком, а появление большого пятна на экране в углублении на фоне ровного дна, с большой вероятностью можно назвать стаей «бели» — некрупной густеры или плотвы. Конечно, однозначных выводов в любом случае делать не стоит, но места предположительного обнаружения рыбы в любом случае можно считать перспективными для ловли. То есть, рыбалка с эхолотом состоит из следующих важных факторов: анализ рельефа дна или наличие привлекательных для рыбы объектов на дне, и наличие символов рыбы на экране. И если одиночные экземпляры рыбы могут иногда отображаться некорректно, то обнаружение стаи крупных рыб практически всегда протекает без осложнений.
чтобы информация о наличии рыбы, которая отображается на экране и реальность максимально совпадали, необходимо настроить чувствительность эхолота и скорость прокрутки экрана. Оптимальные значения для этих параметров устанавливаются исключительно опытным путем. Также желательно установить режим увеличения исследуемого участка (ZOOM). В этом случае информация на экране будет наиболее приближенной к действительности. Когда все параметры эхолота выставлены верно, мы увидим на дисплее дугу или символ рыбы. Значит ли это, что под лодкой действительно находится рыба? С вероятностью 80%- да. Однако бывает и так, что символом рыбы отображается проплывающая под водой коряга или иной предмет, очертаниями похожий на рыбу. Как в этом случае определить, действительно ли в поле луча эхолота попала рыба, а не посторонний предмет? Эхолот дает нам пищу для размышлений, а выводы мы делаем сами, основываясь на знаниях о повадках рыб и местах их обитания. Например, дуга возле донной коряги на глубине может оказаться судаком, а появление большого пятна на экране в углублении на фоне ровного дна, с большой вероятностью можно назвать стаей «бели» — некрупной густеры или плотвы. Конечно, однозначных выводов в любом случае делать не стоит, но места предположительного обнаружения рыбы в любом случае можно считать перспективными для ловли. То есть, рыбалка с эхолотом состоит из следующих важных факторов: анализ рельефа дна или наличие привлекательных для рыбы объектов на дне, и наличие символов рыбы на экране. И если одиночные экземпляры рыбы могут иногда отображаться некорректно, то обнаружение стаи крупных рыб практически всегда протекает без осложнений.
🐳 Виды эхолотов.
В основном все эхолоты делятся на однолучевые и многолучевые. Невозможно сказать однозначно, что лучше — один луч или несколько . Это все определяется индивидуальными запросами рыбака и особенностей ловли. Как уже было сказано выше, один неширокий луч дает четкое отображение структуры дна и подводных объектов, но при этом имеет не очень широкий угол обзора. Дополнительные же лучи эхолота не дает настолько четкого и детального изображения, но при этом позволяют наблюдать за объектами, которые находятся в верхнем и среднем слое воды. Например трехлучевой эхолот 200/455 кГц, формирует три луча, с общим углом покрытия 90 градусов: 20° центральный (200 кГц) и два боковых по 35° (455 кГц). Лучи эхолота выстроены в ряд — центральный луч отображает дно, боковые повышают обзорные свойства эхолота, что позволяет рыболову наиболее четко видеть, с какой стороны от лодки находится рыба. Данная система позволит получить наиболее подробную информацию о происходящем под водой, поскольку узкий луч (20°) проникает глубоко в воду, в то время как широкие лучи (35°) охватывают обширную площадь под лодкой.
. Это все определяется индивидуальными запросами рыбака и особенностей ловли. Как уже было сказано выше, один неширокий луч дает четкое отображение структуры дна и подводных объектов, но при этом имеет не очень широкий угол обзора. Дополнительные же лучи эхолота не дает настолько четкого и детального изображения, но при этом позволяют наблюдать за объектами, которые находятся в верхнем и среднем слое воды. Например трехлучевой эхолот 200/455 кГц, формирует три луча, с общим углом покрытия 90 градусов: 20° центральный (200 кГц) и два боковых по 35° (455 кГц). Лучи эхолота выстроены в ряд — центральный луч отображает дно, боковые повышают обзорные свойства эхолота, что позволяет рыболову наиболее четко видеть, с какой стороны от лодки находится рыба. Данная система позволит получить наиболее подробную информацию о происходящем под водой, поскольку узкий луч (20°) проникает глубоко в воду, в то время как широкие лучи (35°) охватывают обширную площадь под лодкой.
Отдельная категория многолучевых  эхолотов — это шестилучевые модели, которые позволяют генерировать трехмерную проекцию изображения. Однако такие эхолоты часто искажают полученную информацию, и потому требуют хороших технических навыков при настройке перед использованием. Самой популярной моделью является Humminbird Matrix 47 3D.
эхолотов — это шестилучевые модели, которые позволяют генерировать трехмерную проекцию изображения. Однако такие эхолоты часто искажают полученную информацию, и потому требуют хороших технических навыков при настройке перед использованием. Самой популярной моделью является Humminbird Matrix 47 3D.
Технологии обработки и изображения эхо-сигнала.
Принцип работы эхолота заключается в том, что прибор обрабатывает и автоматически управляет такими параметрами, как скорость обновления, чувствительность, синхронизация работы передатчика и приемника. При этом условия эхолокации постоянно изменяются. Некоторые эхолоты позволяют вручную менять основные настройки. Это очень удобно для тех, кто предпочитает от начала до конца участвовать в процессе рыбаки и непосредственно эхолокации.
🚤 Как ведет себя эхолот на скорости.
Прежде всего надо отметить, что эхолот не предназначен для обнаружения рыбы на больших скоростях ! Поэтому на скорости большей, чем 60 км/час дуги рыб и изображения рельефа будут отображаться крайне некорректно. На такой скорости можно получать общую информацию о структуре дна. Что мешает корректной обработке сигнала на высокой скорости? В первую очередь это кавитация, то есть создание пузырьков воздуха вследствие турбулентности водяного потока при работе двигателя. В ряде случаев избежать пагубного воздействия кавитации помогает установка датчика не на транец, а на специальный держатель, который опускает датчик на большую глубину, чем, нежели он находился бы на транце.
Использование эхолота на зимней рыбалке.
Ряд эхолотов имеет возможность подключения дополнительного датчика, который может «просматривать» дно сквозь лед. Однако  здесь есть свои подводные камни. Не всегда можно использовать датчик, который «бьет» через лед. Точнее, его можно использовать только в одном случае: если это первый лед и в нем нет пузырьков воздуха. Любое наличие воздуха в толще льда повлечет за собой искажение изображения. Как мы уже выяснили, для того, чтобы эхолот отображал сведения о глубине и структуре дна, необходимо, чтобы датчик находился в движении. Опуская датчик в лунку, мы ограничиваем его движение и, следовательно, теряем возможность видеть детали структуры дна. Обычные эхолоты для зимней рыбалки, не очень подходят, т.к. есть один недостаток — при изучении дна неподвижно, с помощью такого аппарата, дно как бы «плывет». Для зимней рыбалки, лучше использовать эхолот-флешер. Его главное достоинство — статичность дна. Флешеры способны в режиме реального времени практически мгновенно отображать все, что происходит под лункой. При этом есть возможность одновременного отображения рыбы и приманки. Встроенным флешером обладают модели Humminbird от 596 и выше.
здесь есть свои подводные камни. Не всегда можно использовать датчик, который «бьет» через лед. Точнее, его можно использовать только в одном случае: если это первый лед и в нем нет пузырьков воздуха. Любое наличие воздуха в толще льда повлечет за собой искажение изображения. Как мы уже выяснили, для того, чтобы эхолот отображал сведения о глубине и структуре дна, необходимо, чтобы датчик находился в движении. Опуская датчик в лунку, мы ограничиваем его движение и, следовательно, теряем возможность видеть детали структуры дна. Обычные эхолоты для зимней рыбалки, не очень подходят, т.к. есть один недостаток — при изучении дна неподвижно, с помощью такого аппарата, дно как бы «плывет». Для зимней рыбалки, лучше использовать эхолот-флешер. Его главное достоинство — статичность дна. Флешеры способны в режиме реального времени практически мгновенно отображать все, что происходит под лункой. При этом есть возможность одновременного отображения рыбы и приманки. Встроенным флешером обладают модели Humminbird от 596 и выше.
Что может отобразить эхолот на зимней рыбалке?

Ремонт MarCum SHOWDOWN TROLLER
Во- первых, данные о составе дна. Во- вторых, данные о температуре воды. И, в третьих, мы можем получить данные о возможном местонахождении рыбы. Хоть датчик эхолота и находится в неподвижном положении, но рыба так или иначе находится в движении, поэтому на зимней рыбалке мы так же будем видеть отображение дуг и символов рыбы на экране эхолота. Для того, чтобы улучшить качество изображения на экране эхолота во время зимней рыбалки, необходимо установить низкую скорость обновления экрана, тогда объект, находящийся в воде в движении, будет виден гораздо четче. При этом в случае, если на экране появляется сплошная темная полоса, это может значить, что под водой довольная плотная стая рыб.
На что стоит обратить внимание при выборе зимнего эхолота:
- Время автономной работы (в холоде, емкость аккумулятора падает)
- Простота настроек
- Тип экрана
- Габариты
- Вес
Эхолоты Smartcast

Ремонт Эхолотов Smartcast

Ремонт Minn Kota DECKHAND DH 40
Современные эхолоты позволяют исследовать дно и подводные объекты с берега,Smartcast используя беспроводные датчики. Это удобно для тех, кто, помимо рыбалки с лодки, любит рыбачить с берега. Такие эхолоты очень компактные и могут устанавливаться на удочку, или в виде наручных часов. Например уникальная модель Smartcast RF35е — беспроводной рыбопоисковой эхолот, выполненный в виде наручных часов. Датчик можно использовать стационарно или в движении, при этом на дисплее будет отображаться изображение Smartcastтой зоны, над которой проплывает датчик. Эхолоты Smartcast RF35е идеально подходят для изучения дна на большом расстоянии и для ловли рыбы с берега. Прибор выдает сигнал обнаружения рыбы, а максимальная глубина обнаружения составляет 35 м. Датчик работает от замыкания двух контактов, что продлевает срок службы батареи.
Эти модели нельзя использовать как зимние эхолоты, так как они выходят из строя при температуре ниже нуля !
Практические выводы: Эхолот с большим углом обзора и низкой частотой излучения дает возможность быстро прочесать большие пространства. Это полезно при обследовании совершенно незнакомого места. Эхолот с высокой частотой излучения и малым углом обзора дает более точную информацию о происходящем под лодкой и в ближайших окрестностях. Так легче искать конкретную яму, бровку или банку. Чем ближе к поверхности эхолот показывает рыбу, тем ближе к курсу движения Вашей лодки эта рыба находится. Однолучевой эхолот на рыбалке — тоже хороший помощник, не обязательно гнаться за количеством лучей.