- Рыбачим увлекательно: лучшие подводные дроны для рыбалки
- Пять лучших дронов для рыбалки
- Chasing Dory
- Geneinno Titan 150M Standard
- Robosea Biki V1.0
- PowerVision Power Ray Wizard
- Gladius Mini Combo
- Gladius: самый доступный подводный дрон
- О продукте
- Управление
- Основные преимущества
- Комплектация
- Standard
- Advanced
- Доп.аксессуары
- Как рыбачить с помощью квадрокоптера
- Как рыбачить с дроном
- Нужен ли дрон для рыбалки
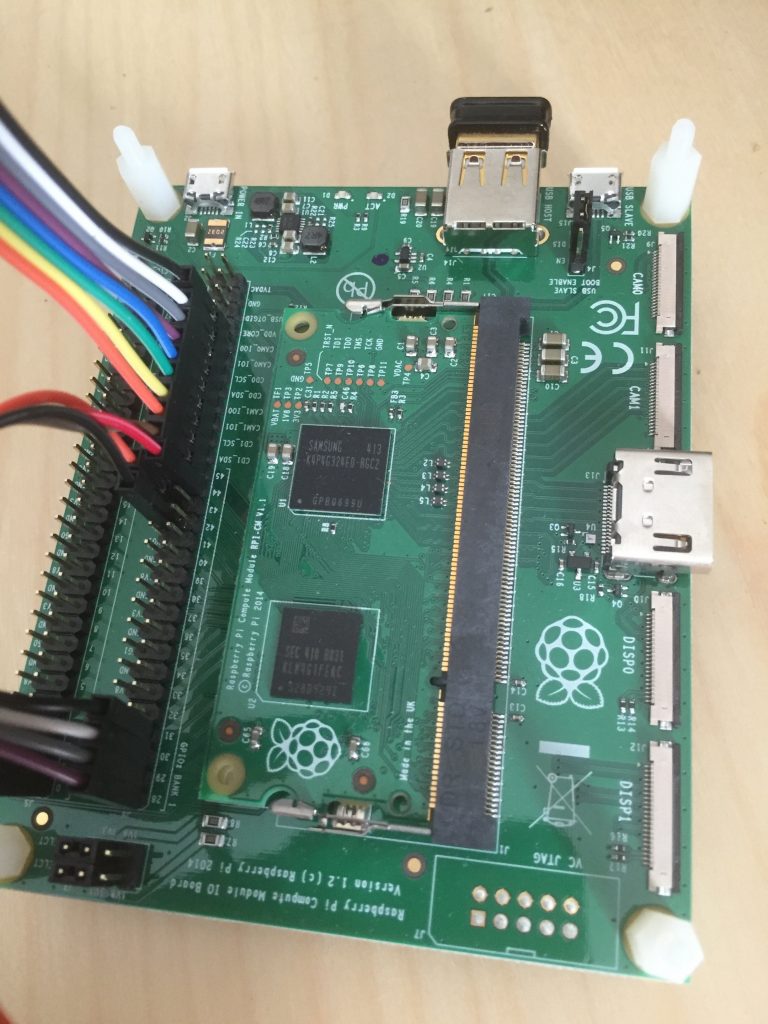
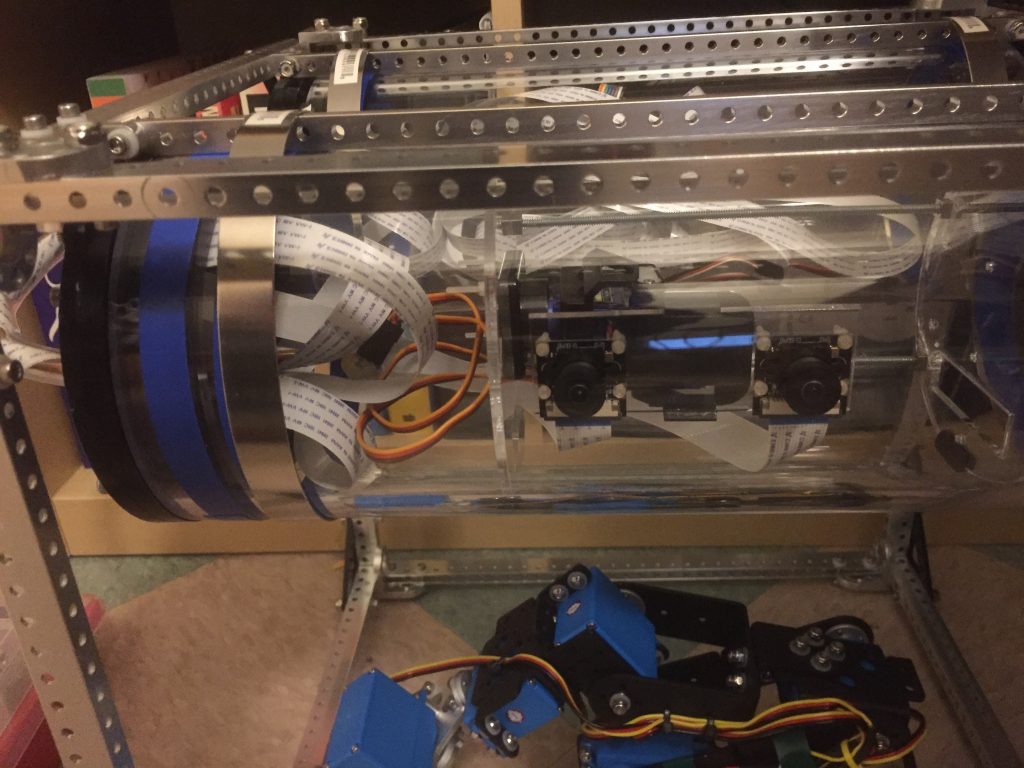
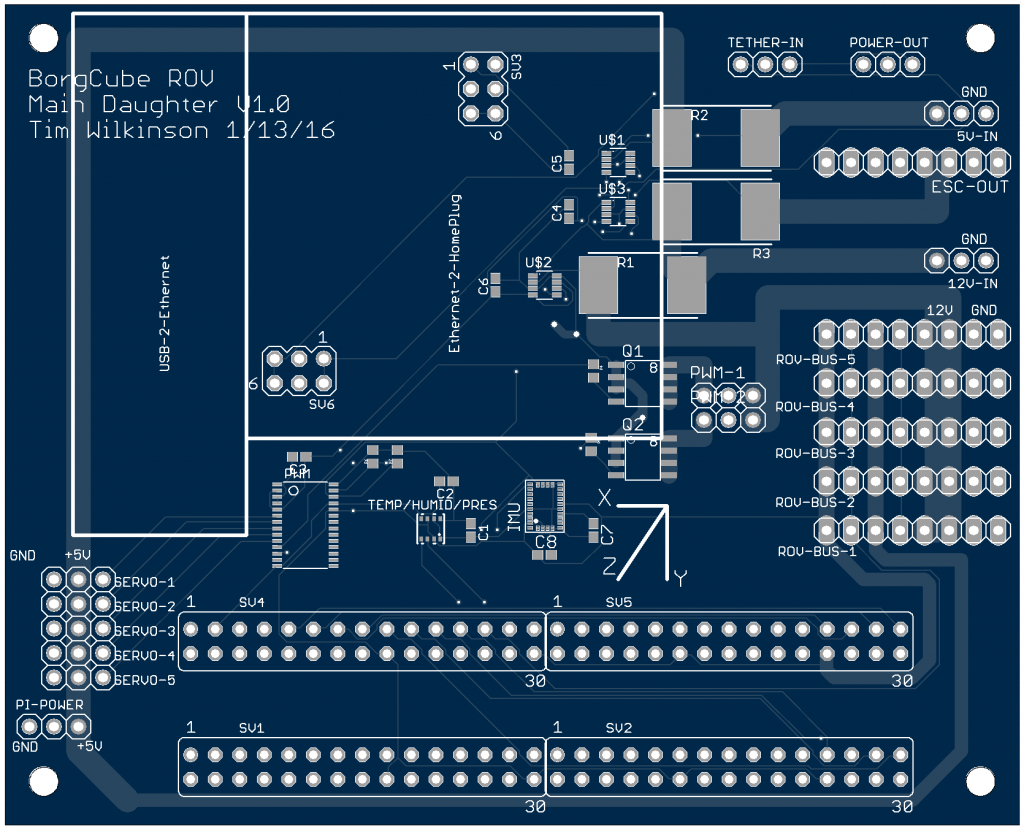
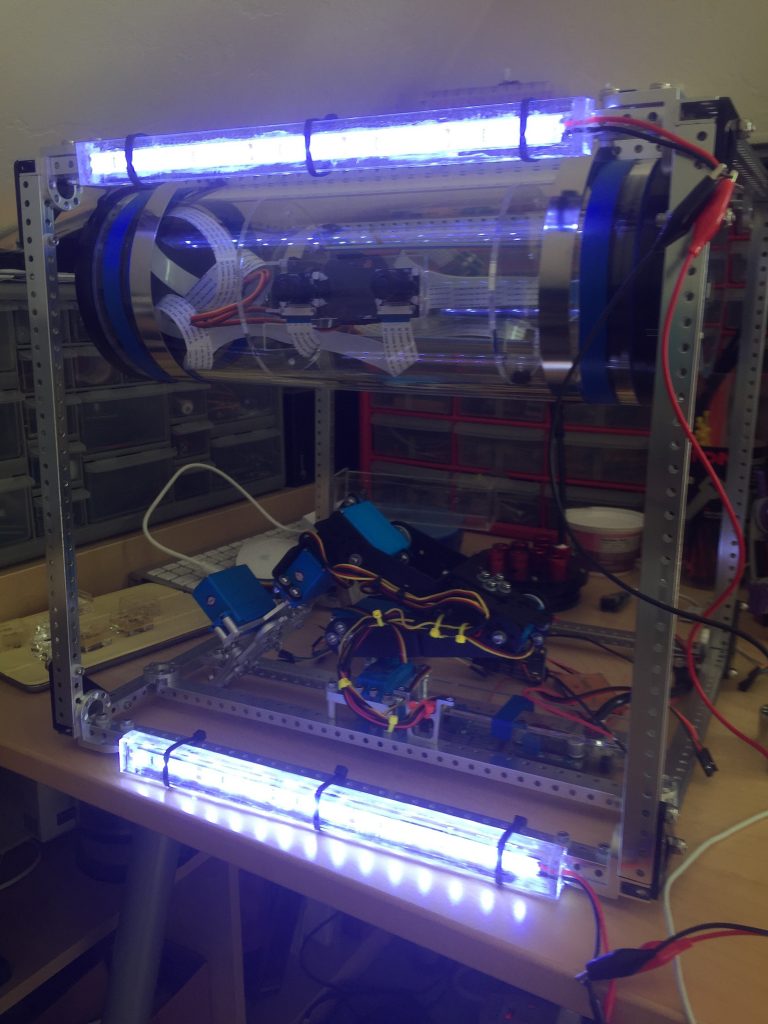
- Проект ROV BorgCube (Часть 1.)
- Водонепроницаемый сервопривод
- Гидроизоляция
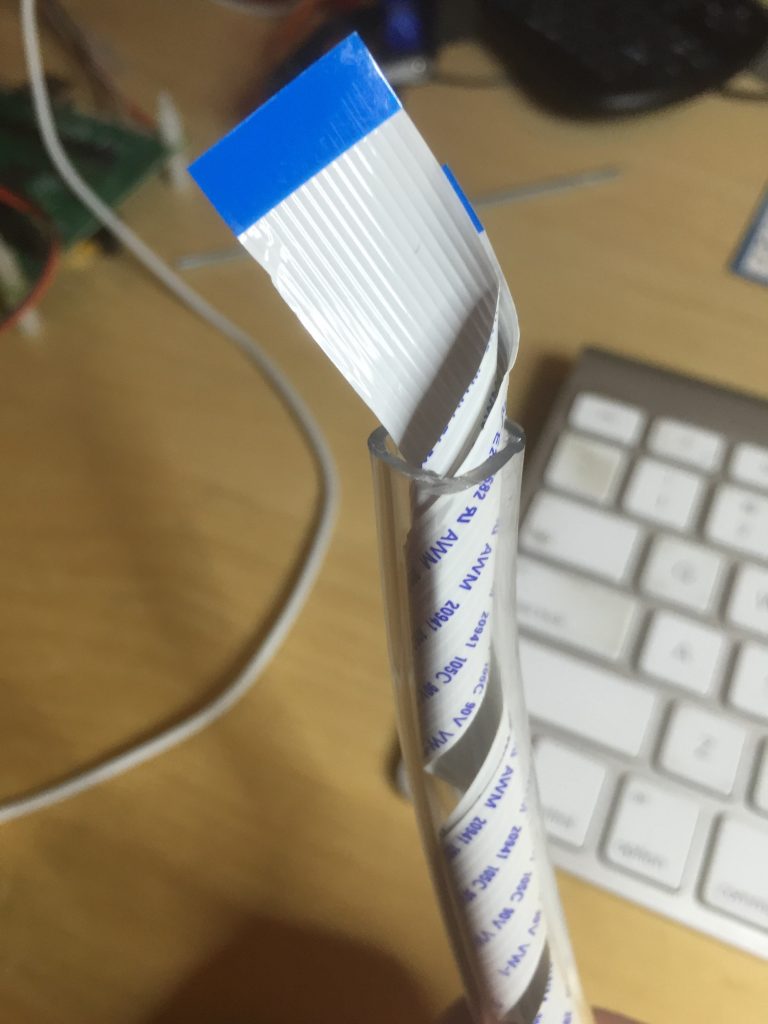
- Видео шлейф
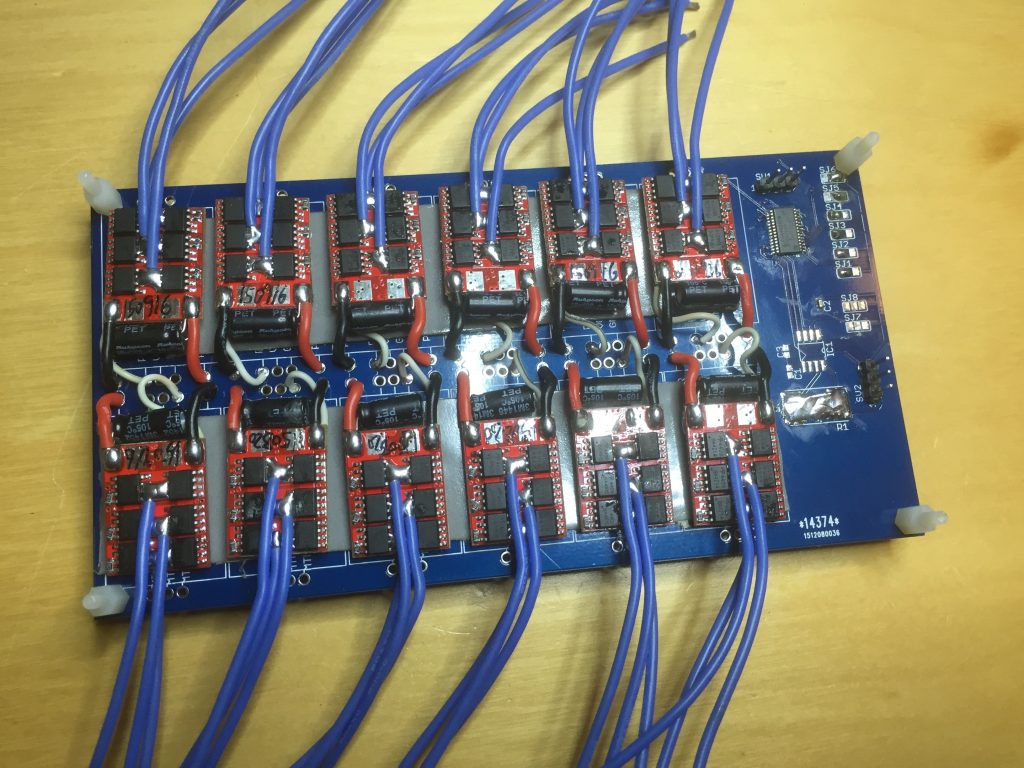
- Thrusters: ESCs
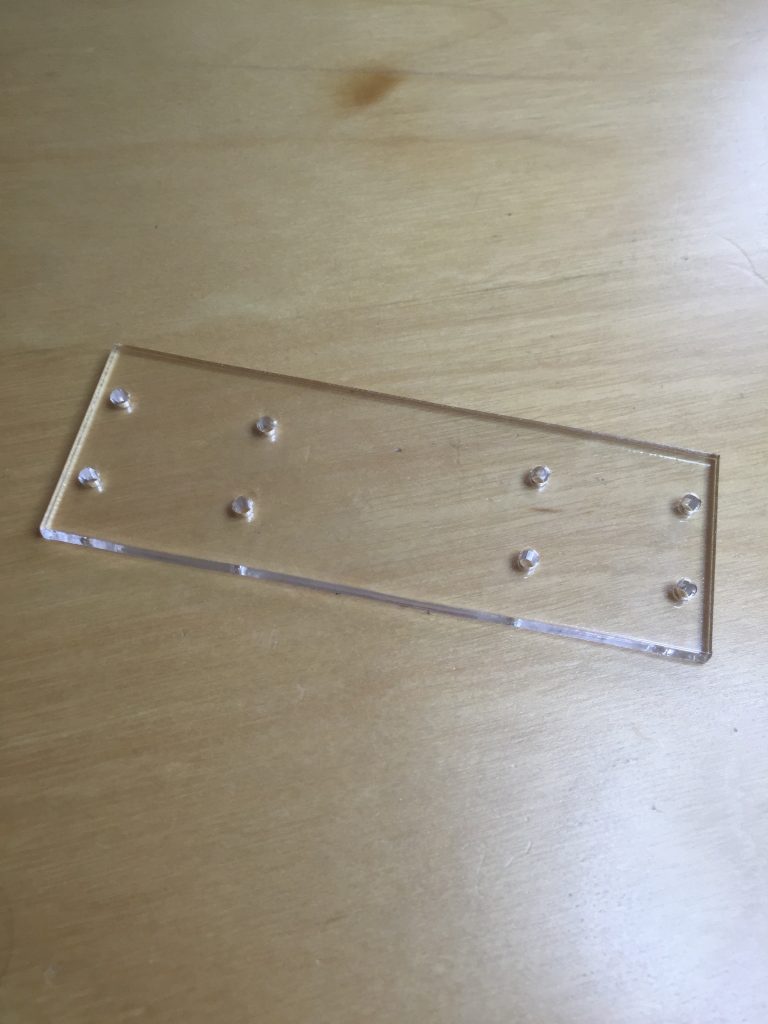
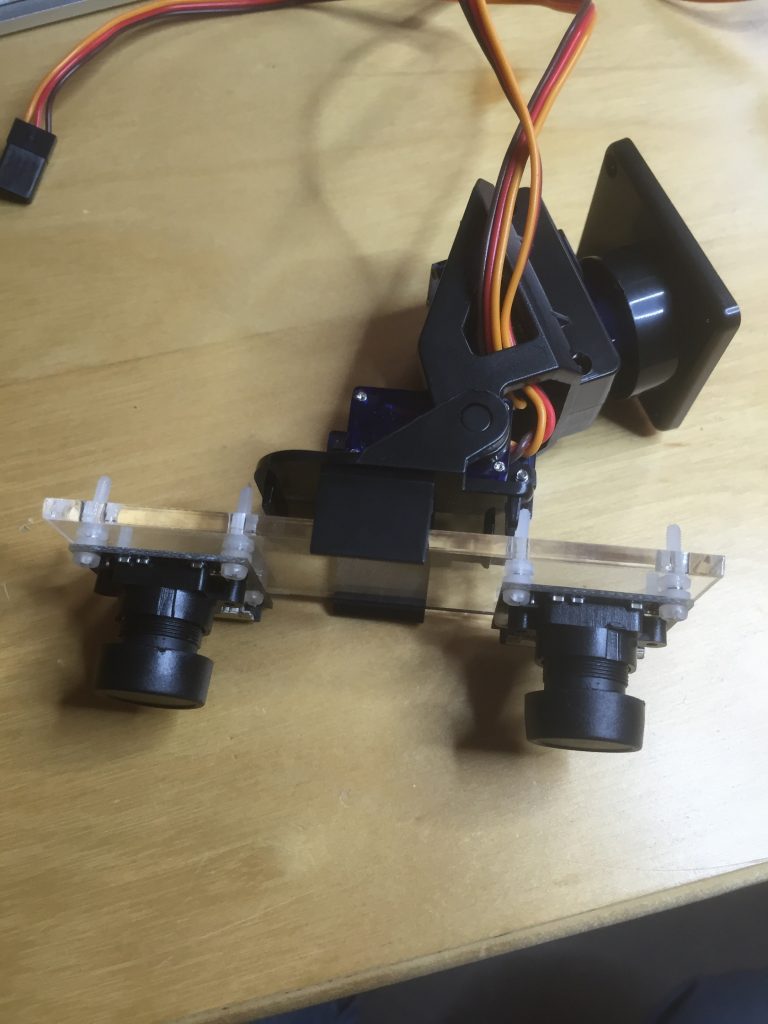
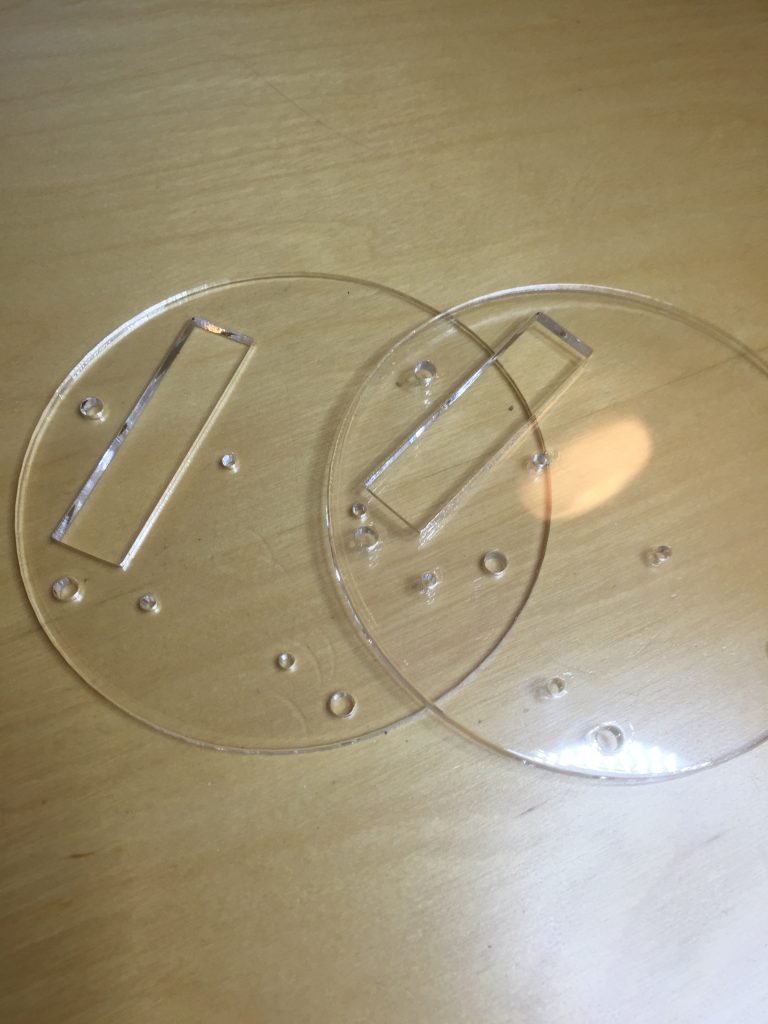
- Крепление камеры
- Крепление камеры: обновление
- Манипулятор
- Шина: I2C
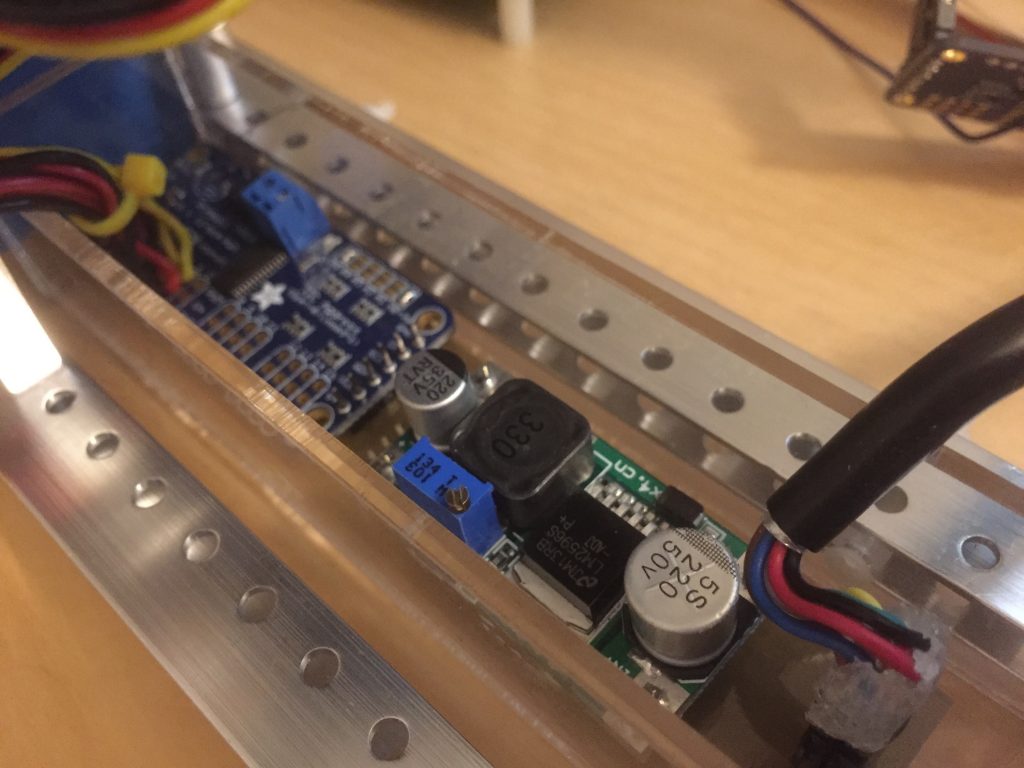
- Манипулятор: электроника
- Основная дочерняя плата.
- Эпоксидная смола.
- Светодиодное освещение
- Светодиодное освещение: обновление
Рыбачим увлекательно: лучшие подводные дроны для рыбалки
Летающие дроны с качественной камерой – это уже обыденность. Они используются просто людьми, для которых это игрушка. Но также они актуальны среди профессионалов, ведь с помощью квадрокоптеров можно снимать шикарные ракурсы (как, например, в travel-шоу «Орел и Решка»), проводить динамичную съемку и т.д.

Параллельно с летающими дронами разрабатывались и подводные, но долгое время у производителей не получалось ничего путного, а потому даже просто в интернет-магазинах подобных устройств было не найти. Но теперь ситуация изменилась. Сегодня есть несколько компаний, которые не просто провели успешные тесты, они уже полноценно запустили в продажу несколько рабочих моделей, полностью готовых к эксплуатации.

Пять лучших дронов для рыбалки
Сразу стоит сказать, что каждое из рассматриваемых устройств имеет отличные характеристики и прекрасно справляется со своей задачей. Поэтому не будем устраивать хит-парад, а просто перечислим модели, а читатель сам решит, что из этого ему больше нравится.

Chasing Dory
Это небольшой, простой и легкий дрон, с которым можно осматривать подводные красоты. Он лучше всего проявляет себя в пресной воде. То есть, его желательно использовать при исследовании или рыбалке где-нибудь в озере или реке, а не море.
Его самой интересной фишкой является то, что в нем есть кооперативный режим. Один человек выступает в роли штурмана, то есть, управляет лодкой. Второй – оператор, он отвечает за съемку и в его распоряжении будет Full HD камера.
Управляется устройство через смартфон, подключается через буй с поддержкой Wi-Fi. Максимальная скорость движения 0,77 м/с. Это вполне хватит, чтобы успешно догонять подводную фауну. Для съемки в темное время суток или мутной воде есть светодиодная подсветка.
Это самая бюджетная модель из имеющихся.

Geneinno Titan 150M Standard
Если вы профессиональный рыбак или ваша работа напрямую связана с подводным миром и съемками, то Geneinno Titan – это идеальный вариант. Данная модель, несмотря на свою стоимость (чуть меньше 200 тыс. руб.), пользуется большим спросом. Объясняется это ее функционалом и кучей примочек, которые заставят упасть вашу челюсть, если вы только знакомитесь с подводными дронами.
Собственно, это устройство имеет в своем арсенале следующее:
Оно может погружаться на глубину до 150 м (дайверам для таких показателей нужно долго и дорого обучаться);
Гаджет перемещается по кабелю, на втором конце которого расположен Wi-Fi передатчик;
Камера обеспечивает охват в 160 градусов;
Снимать видео можно на протяжении 2 часов;
Дрон можно опускать как в пресную, так и морскую воду;
В комплектации предусмотрены различные аксессуары. Например, специальная клешня, которой можно собрать пробы растений или грунта;
Батарея дает возможность управлять дроном до 4 часов;

Robosea Biki V1.0
Имеет интересный дизайн. Выглядит как роботизированная рыба, что нестандартно для подводных дронов. Он выглядит не агрессивно или хищно, а как миролюбивый подводный житель. Погружается на глубину до 100 метров. Развивает скорость до 1,1 м/с. Пусть это и не самый большой показатель, но зато в конструкции отсутствуют пропеллеры, которые могут навредить рыбам или запутаться в водорослях.
Главный плюс этой модели – бесшумная работа. Она двигается за счет своего вертикального плавника и не отпугивает рыб. Устройство будет среди них, словно свой. Это позволит снимать самые невероятные кадры подводного мира или четко понимать, в каких местах будет клёв.
Дрон снимает видео в разрешении 4К, управляется со смартфона. Есть встроенный GPS на случай, если сигнал прервется. Помимо этого, пользователь может поплавать вместе с подводной лодкой, так как пульту не страшна вода.

PowerVision Power Ray Wizard
Это один из лучших дронов для рыбалки. Он, как и прочие модели, может снимать видео, фото в хорошем качестве и т.д. Но, кроме того, он имеет ряд очень полезных опций:
С его помощью можно легко найти рыбу, так как он оснащен датчиками и гидролокаторами. Устройство покажет, что за местность под водой, сколько там рыбы, какова температура и т.д.;
Рабочий диапазон температур варьируется от -10 до +50 градусов. То есть, использовать эту подводную лодку можно даже во время зимней рыбалки;
Она развивает скорость до 2 м/с, что является одним из самых высоких показателей;
Рыбак сможет фактически присутствовать под водой, ведь в комплекте с дроном идут VR очки. Управлять при этом можно будет поворотами головы;

Gladius Mini Combo
Имеет необычную форму и пользуется большой популярностью среди дайверов. Отлично подходит для различных экспедиций и исследований. В интенсивном режиме может работать до 2 часов. Съемка проводится за счет 12-мегапиксельной камеры, которая снимает видео в 4к (30 fps) или 1080р (120 fps).
Сигнал от дрона к пульту будет действовать на расстоянии 100 метров. Этот показатель, соответственно, и является максимальной глубиной. Скорость хорошая, 2 м/с. Данная модель – это золотая середина, у нее умеренная цена (примерно 130 тыс. руб.) и неплохие характеристики.
Gladius: самый доступный подводный дрон
О продукте
Очередной удачный стартап, который засветился на известной краудфандинговой платформе «INDIEGOGO». Разработчиком дрона выступает компания Chasing-Innovation Technology Co. Ltd. Китай. Gladius – подводный беспилотник, предназначенный для осуществления фото видеосъёмки под водой на глубине до 100 метров на протяжении 3 часов. Может оснащаться двумя вариантами камер различными по качеству съёмки это 1080P/4К (в зависимости от комплектации Standard/Advanced), обе камеры оптимизированы для съёмки под водой.
Камеры работают в тесной связи с сенсорами низкой освещенности, а сам тандем работает по специальному алгоритму обработки качества изображения. Благодаря такому подходу на выходе получается высококачественный фото и видеоматериал, реализованный под водой.

Управление
Управляется Gladius дистанционно, посредством классического раздвижного пульта в который устанавливается смартфон/планшет. Пульт имеет пару джойстиков и ряд кнопок. Тандем тесно взаимодействует с плавучем буем по Wi-Fi.
![]()
В сам буй устанавливается Wi-Fi модуль, ну а буй уже непосредственно взаимодействует с беспилотником с помощью кабеля. В зависимости от комплектации, расстояние удаления будет доступно на 50 метров, и на 500 метров (в зависимости от мощности модуля Wi-Fi).

Один из джойстиков аппаратуры управляет дроном, другой управляет камерой. С пульта так же будут доступны различные режимы работы LED-подсветки для обеспечения оптимального освещения под водой. На дисплей сопряженного устройства (смартфон/планшет) в режиме реального времени транслируется видео картинка в качестве 720P.
![]()

Глубина погружения ограничивается длинной кабеля. В зависимости от комплектации она может быть до 50 метров, и до 100 метров. Расстояние удаления ограничивается мощностью Wi-Fi передатчика, что в устанавливается в буй (доступно на 50м. и на 500м.)

Основные преимущества
- Является самым доступным подводным дроном
- Лёгок в управлении, благодаря 4 подруливающим гребным винтам, 4 степеням свободы и компактному контроллеру.
- Расстояние удаления до 500 метров с погружением до 100 метров.
- Лучшее в классе качество 4К съёмки под водой без искажений.
- В комплект входит портативный кейс весом всего 3кг (6.6lbs) с размерами 40.6 × 103.2 × 9.4см.

Внутренняя часть корпуса подводного дрона исполнена из алюминиевого сплава подверженного химическому оксидированию. Такой подход обеспечивает дрону максимальную водонепроницаемость и коррозийную стойкость.

Комплектация
Как уже упоминалось выше, производитель предлагает 2 варианта комплекта:

Standard
- Gladius дрон
- 1080P камера
- Wi-Fi Буй с 50м кабелем (для погружения)
- Модуль Wi-Fi с расстоянием удаления до 50 метров
- Раздвижной пульт управления
- Карта памяти на 16Гб
- 57Wh батарея
- Зарядное устройство
- Инструкция

Advanced
- Gladius дрон
- 4К камера
- Wi-Fi Буй с 100м кабелем (для погружения)
- Модуль Wi-Fi с расстоянием удаления до 500 метров
- Раздвижной пульт управления
- Карта памяти на 64Гб
- 57Wh батарея
- Зарядное устройство
- Инструкция
Доп.аксессуары
Так же доступны аксессуары, которые можно докупить отдельно:
- Транспортировочный кейс (умещает в себе помимо дрона все сопутствующие комплектующие)

Gladius позиционируется производителем как самый доступный подводный беспилотник для всех желающих реализовать красивую и безопасную съёмку под водой.
Как рыбачить с помощью квадрокоптера
Когда заходит речь о рыбалке с помощью дрона, у многих перед глазами встает картина — привязываем рыболовный крючок к квадрокоптеру и ловим используя дрон вместо удочки.
Однако, это абсолютно неправильное представление! 90% видео на ютубе с такой рыбалкой — фейк! Посмотрите — выловленная рыба на крючке не дергается!
Кроме этого — рыба никогда не клюет сразу и ее надо подсекать, иначе она объест червяка и уйдет.
По настоящему дроны используют при морской или океанской рыбаке с берега.
При такой рыбалке надо закинуть крючок с наживкой на 200-300 метров от берега и тут — квадрокоптеры имеют огромное преимущество за счет скорости доставки и за счет того, что рыбачить на побережье с дроном можно и в одиночку.
Как рыбачить с дроном
Наживку насаживают на крючок, крепят леску к дрону и относят им к месту заброса. На видео выше показан способ крепежа устройства для заброса с дрона.
Фактически устройство состоит из поводка с утяжелителем (что бы порывом ветра не забросило леску или поводок в пропеллеры) и прищепки.
Когда дрон достигнет нужной точки, катушка спиннинга стопорится и леска вырывается из прищепки.
Весьма простое устройство, не так ли? Для его изготовления не требуется как то модернизировать ваш дрон или дорабатывать плату управления выводя отдельный канал сервомашинкой на отцеп.
Таким образом можно рыбачить не только на морях, если вы неважно владеете забросом спиннинга, то можете завозить крючок дроном на любой реке или озере.
Нужен ли дрон для рыбалки
Специально покупать дрон для рыбалки имеет смысл только в том случае если вы увлекаетесь океанской рыбалкой.
А вот если ваши места ловли рыбы реки и озера, то дрон имеет смысл использовать только в том случае, если он у вас уже есть.

Для завоза снасти и прикормки на озерах и реках лучше использовать «кораблик для рыбалки». Кораблик может завозить за раз весьма большой объем прикормки, так же он может заниматься и завозом крючков с наживкой.
В эксплуатации кораблик проще, нет опасности, что он «упадет и утонет». На океанской рыбалке корабли слабоприменимы потому, что у берега всегда большие волны и плывущий кораблик для рыбалки виден только тогда, когда преодолевает гребни волн.
А на спокойной воде проще использовать именно его, чем рисковать падением дрона в воду.
Так же смотрите статьи смежной тематики:
 |