- Как охотились за подводными лодками
- Охота за подводными лодками. Часть вторая
- Охота за подводными лодками. Корабли гидроакустической разведки.
- Дубликаты не найдены
- Оружейная лига
- Правила сообщества
- Секретные подводные лодки ГУГИ в Арктической экспедиции
- Научные суда в системе разведки НАТО
- Подводная лодка (SSGN) как платформа для спецопераций
- Охота за подводными лодками. Гидрология войны — часть вторая.
Как охотились за подводными лодками
Пожалуй, только пехотинцы не уступят подводникам по разнообразию придуманных против них средств умерщвления.
Уже в те пасторальные времена, когда лодки имели привычку всплывать при виде беззащитного гражданского судна, позволять команде его покинуть, а потом расстрелять из пушек, если торпеды было жаль, появился способ охоты на приманку.
Мальчишкой я увлекался чтением книжек о знаменитых охотниках. Привяжут козлика в джунглях, тот жалобно блеет и из чащи на эти звуки выходит тигр. И получает пулю из штуцера притаившегося на помосте стрелка. Так и тут — крадётся вдоль бережка без всякой охраны вкусненький, жирненький пароходик. Лодка принюхивается, присматривается и не обнаружив никакой опасности, всплывает и приближается . Но на пароходике неожиданно сбрасывают маскировку со скорострельных орудий и козлик моментально превращается в тиранозавра, разрывая обманутого тигра безжалостными клыками многочисленных снарядов.
Но надо отметить, что в целом этот метод оказался малорезультативным. Так, в первую мировую войну британский флот с помощью судов-ловушек уничтожил 14 немецких подводных лодок и повредили 60, собственные потери составили 27 судов.
Да и какова вероятность подобной встречи? А вот идея поставить сети для ловли такой рыбки, как подводная лодка, в местах, где она обязательно появится, например, на входе в военно-морскую базу, появилась сразу, как только появились подводные локдки. Вот воспоминания командира одной из первых русских подводных лодок «Сомъ» князя Владимира Трубецкого об испытании противолодочной сети:
«27 марта (1905 года) снялся с якоря, погрузился на 16 футов, и, идя со скоростью 6 узлов, прорвал сеть, причем лодка быстро стала подниматься, не слушая горизонтальных рулей. Увеличил ход до 7 узлов, заставил лодку слушаться рулей. Всплыл по своему желанию на поверхность. Оказалось, я сеть прорвал и всю ее вместе с буйками тащил за собой».
Не могу не добавить также, что именно эта подводная лодка под командой отчаянного князя впервые совершила подлёдное плавание, пусть непродолжительное, но это были лишь первые шаги.
Сети делали всё более мощными и обширными. Известно, что у побережья Франции были заграждения до 200 километров длиной. А вот фото одного из складов поплавков для сетей американского флота:
Но и лодки отрастили себе специальные пилы-сетепрорезатели, устанавливавшиеся в носовой части корпуса над баком и на нижней части форштевня — так они выглядели:
Однако при сравнительных испытаниях была отмечена их неудовлетворительная эффективность: пилы перерезали только горизонтальные тросы сетей, поэтому лодка запутывалась в вертикальных И тут такая тонкость была. Иногда сети устанавливались так, что лодка легко срывала их с крепления. И при дальнейшем движении сеть потоком воды прижималась к корпусу субмарины. А к сети крепились специальные пиропатроны, которые при этом взрывались и уничтожали подводный корабль.
Впрочем, некоторые сети выполняли лишь сигнальную функцию — при наталкивании на них лодки специальные устройства начинали выпускать далеко заметный дым и огонь. Дежурным противолодочным силам оставалось лишь примчаться к этому месту и расправиться с обнаруженной жертвой.
Вторым массово применявшимся пассивным средством борьбы с лодками были минные поля. Некоторые участки Балтики назывались «супом с клёцками», так густо они были нашпигованы минами. Разных конструкций, на разных глубинах. Сколько же лодок погибло от мин в обеих мировых войнах. Но существовала ещё и масса активных способов охоты на них.
Вообще-то, первоначально лодки можно было обнаружить только визуально. По пенистому следу от перископа или неосторожно всплывшую. Так же и след от торпед мог указать направление на затаившегося подводного врага. И можно было попробовать настичь его, если торпеды прошли мимо. В противном случае не до того будет.
С появлением авиации подводникам стало ещё труднее, авиаторы могли разглядеть их и под слоем воды, причём лодка при этом и не подозревала об обнаружении. И если самолёты могли патрулировать непродолжительное время, то такая штука как дирижабль, могла висеть над морем хоть сутки. Кстати, известен бой между дирижаблем и подводной лодкой у берегов США во Вторую мировую войну. Победила лодка 🙂
Поверхность моря просматривалась многими тысячами глаз в любое время суток. И даже старина Хэмингуэй во время войны занялся патрулированием на своём катере «Пилар» с целью обнаружения немецких подводных лодок в Карибском море.
Но лодку можно не только увидеть, но и услышать. Первые гидрофоны стали применяться ещё в борьбе с кайзеровскими подводниками. Однако гидрофон может указать лишь на присутствие лодки и примерное направление на неё, но не дистанцию. Тем не менее, несколько пеленгов, пересекаясь, дадут и примерное местоположение. И если лодка находится в районе минного поля, можно дистанционно подорвать нужный его участок вместе с лодкой.
Кроме того, место предположительного её местонахождения можно закидать глубинными бомбами, как изображено на верхнем снимке. Однако как ещё стараются обнаружить и уничтожить подводного врага, рассмотрим в следующей статье.
Отдельно о минах можно почитать здесь: Чем морские мины лучше снарядов
Охота за подводными лодками. Часть вторая
Предисловие. В этот раз я, как и обещал, напишу о тактике использования противолодочных самолетов. Спонсором данной статьи выступает чашка молока Moloko Plus. Если вы хотите «уйти в Землю», тогда Moloko Plus — ваш выбор!
Противолодочные самолеты имеют высокие тактические характеристики и являются наиболее эффективным средством поиска, обнаружения и поражения подводных лодок. Они способны действовать как в одиночку, так и в составе других противолодочных средств.
Радиогидроакустические буи (РГАБ) — это основное средство поиска подводных лодок. Их использование позволяет, во-первых, установить факт наличия подводной лодки в районе, а во-вторых — классифицировать ее, определив тип, принадлежность и параметры движения.
После первичного обнаружения и классификации цели осуществляется ее локализация, которая предусматривает определение места ПЛ с точностью, обеспечивающей возможность применения по ней оружия. Для этого, самолет может сбросить дополнительные буи или воспользоваться магнитным обнаружителем.

Вот эта хреновина в хвосте самолета — детектор магнитных аномалий.
В целом, принцип действия данного устройства довольно прост — это обычный магнит, который срабатывает при сближении с крупными металлическими объектами. Достоинством данного способа обнаружения является независимость от гидрологических условий. Недостатками — малая дальность действия (в среднем, до 1-2 км) и необходимость снижаться на высоту до 20 метров.
Тактика слежения за подводными лодками при помощи РГАБ.
Действующие тактические инструкции предписывают экипажам самолетов выполнять постановку буев при поиске ПЛ при помощи специально разработанных типовых схем. Выбор схемы осуществляется заблаговременно, что упрощает работу экипажа по части такстических расчетов. Художник из меня хреновый, и все же я постарался изобразить некоторые из схем на рисунке, для наглядности:
— красная стрелка — предполагаемый маршрут движения ПЛ.
— оранжевые кружки — радиогидроакустические буи (вид сверху).

Данная схема довольна проста и позволяет самолету отслеживать движение подводной лодки, которая или не подозревает о слежении, или игнорирует его, например, следуя в надводном положении. При этом курс и скорость ПЛ не меняются. Вы спросите, зачем самолет будет следить за лодкой, идущей в надводном положении, при помощи РГАБ? Ведь ее и так видно? А для того, чтобы произвести запись ее шумов, которую в дальнейшем отправят в специальную лабораторию, где запись внимательно исследуют и составят по ней акустический портрет. Ну и чтобы не дать субмарине уйти от преследования после ее погружения.

Схема постановки буев в форме «галочки», или «шеврона». Применяется в случае, когда ожидается маневр цели вправо или влево, чтобы не потерять ее.
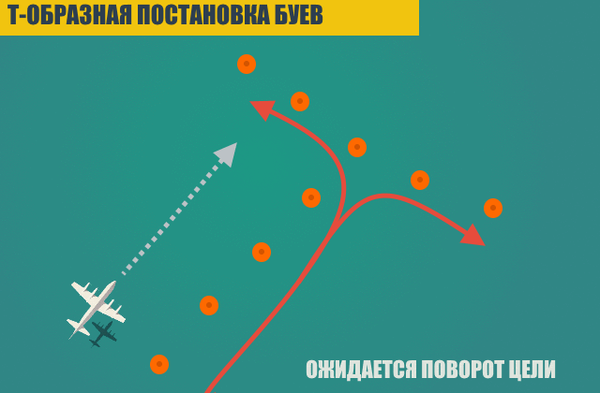
А вот эта схема уже чуть более хитрее. Используется самолетами, когда ожидается маневр цели, но неизвестно, в какую сторону она отвернет. Соответственно, когда сработает самый верхний на картинке буй — цель совершила поворот влево, а если сработает самый крайний буй справа — вправо. Все просто.
Постановка буев осуществляется самолетом заблаговременно в районе предполагаемого нахождения подводной лодки. Главное лишь установить «акустический контакт», так сказать, начальную точку, от которой затем производятся все необходимые расчеты. Как правило, экипаж самолета перед вылетом в район уже имеет некоторые инструкции, как следует действовать. Если выработанная тактика подвела и самолет потерял контакт с подводной лодкой, тогда в срочном порядке выставляется мини-барьер из РГАБ по ходу движения ПЛ:

Как видите, в данной ситуации подводной лодке практически некуда деться: ни отвернуть вправо, ни влево, ни вернуться назад — ведь там уже тоже работают буи. Хотя бы один из них сработает и даст сигнал самолету, который в тот же момент воспользуется этим. Кроме того, всегда есть возможность использовать детектор магнитных аномалий, о котором я уже писал выше, если есть какие-либо сомнения.
Различных вариантов барьеров и схем очень много. Кроме того, тактика постоянно улучшается и модернизируется исходя из накопленного опыта слежения за нашими подводными лодками, так что может возникнуть ощущение, что уйти от преследования самолета невозможно. Но это не так. Во-первых, наши тактики тоже не спят. Существуют схемы маневров уклонений для подводных лодок, которые позволяют прорывать подобные барьеры. Постоянно отрабатываются практические учения по их применению совместно с нашей противолодочной авиацией и весьма успешно. Во-вторых, все это выглядит четко только на бумаге. В реальности действуют сотни различных факторов, ограничивающих эффективность гидроакустических буев: волнение моря, температура и соленость воды, тип гидрологии, наличие акустических помех и прочее.
Бил себя по рукам: 1 раз(а).
P.S. Следующий выпуск статей будет посвящен противолодочным вертолетам и тактике их применения. Следует ли мне перед этим сделать статью по тактике торпедной атаки ПЛ самолетами? Спасибо всем, кто дочитал до конца. В комментариях пишите, как вам мое оформление тактических схем? Старался сделать как можно проще, нагляднее и красочнее.
P.S.P.S. Баянометр ругался на Малькома Макдауэлла. Ну что поделать, люблю я его :3
UPDATE: и чуть не забыл. Бонусом к посту видео, как самолет сбрасывает в воду гидроакустический буй.
Охота за подводными лодками. Корабли гидроакустической разведки.
Всем привет. Не так давно я посвятил две своих статьи общим понятиям гидроакустики и гидрологии (тег #гидрология в помощь заинтересованным). Рассмотрение данного вопроса подвело нас к сегодняшней теме — кораблям гидроакустической разведки ВМС США.

Рис. 1. КГАР типа «Викториес». ВМС США.
Обозначение НАТО: T-AGOS-19
Водоизмещение: 3100 тонн
Длина х ширина х осадка: 72 х 29 х 7,6 м
Энергетическая установка: дизельная
Конструкция корпуса: катамаранного типа.
Скорость (крейсерская): 9,6 узлов.
— головной корабль серии по состоянию 07.07.2017 17:45 (UTC+09:00) осуществляет патрулирование в районе Южно-Китайского моря (29,16° Ш / 129,97° Д).
— поиск и слежение за подводными лодками ВМФ РФ.
Корабли гидроакустической разведки были введены в строй в 70-х гг. прошлого века в качестве маневренных сил дальнего противолодочного наблюдения как эффективное дополнение уже развернутой на тот момент стационарной системы SOSUS. Они не имеют собственного вооружения, но могут нести на борту противолодочные вертолёты. Их главное средство — гибкая протяженная буксируемая антенна типа «SURTASS» и активный низкочастотный гидролокатор.
Гидролокационная система, служащая для дальнего обнаружения подводных лодок. Состоит из двух компонент — активной антенны LFA и пассивной SURTASS — набора из гидрофонных ячеек.
Основной компонент системы — это SURTASS. Длинный (2000 м) кабель, представляющий собой массив из гидрофонов — устройств, преобразующих механическую энергию звука в электрические сигналы, которые записываются и анализируются бортовой аппаратурой AN/UYS-2. Во время работы антенна погружается в воду на глубину от 150 до 450 метров (решение о глубине погружения антенны применяется на основании гидрологических условий). Для поддержания заданной глубины судно сбрасывает свою скорость до 3-4 узлов.
Дальности обнаружения подводных целей: до 350 километров.
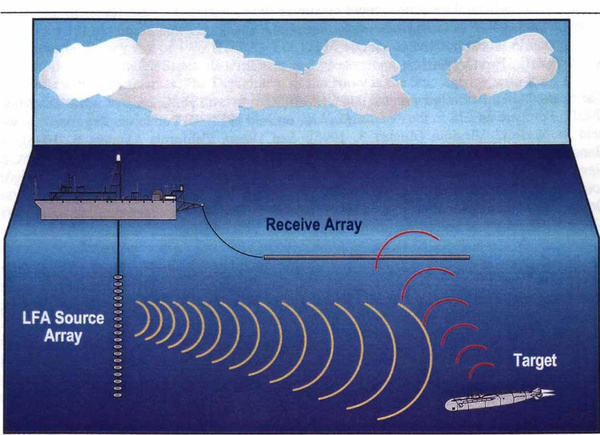
Рис. 2. Схема работы системы SURTASS при комплексном использовании двух компонент во время поиска ПЛ.
LFA — Low Frequency Active — это низкочастотный гидролокатор, который является источником акустических сигналов, предназначенных для эхо-пеленгования подводных лодок на огромных дистанциях. Он используется в условиях, когда применение SURTASS недостаточно эффективно. На рисунке 2 антенна производит посылку низкочастотных импульсов, которые, распространяясь на большие расстояния в воде, отражаются от подводных объектов (эхо-сигнал) и улавливаются пассивной компонентой системы (Receive Array). Анализ данных сигналов позволяет классифицировать и локализовать объект. В случае, если цель классифицируется как подводная лодка, корабль устанавливает за ней слежение с целью установить ее генеральные курс и скорость и передает полученную информацию на посты управления. По этим данным в район местонахождения подводной лодки наводятся самолёты и противолодочные корабли.
На данный момент на Тихоокеанском ТВД находится 5 кораблей гидроакустической разведки, которые на боевой службе (от 60 до 90 суток) патрулируют районы близ берегов Камчатки, Японии и Филиппинских островов. Их основная цель — дискретные составляющие шумов наших подводных лодок. Эти данные впоследствии применяются для составления акустических портретов ПЛ. Акустические портреты, в свою очередь, позволяют не только идентифицировать шум вплоть до бортового номера корабля, но и увеличивают дальность обнаружения целей путем выделения дискретных составляющих на фоне общих шумов океана.

Рис. 3. КГАР типа «Импекбл» ВМС США (на вооружении пока в единственном экземпляре).

Рис. 4. КГАР типа «Хибики» ВМС Японии. На вооружении — 2 единицы.
Дубликаты не найдены

Оружейная лига
3.5K постов 17.6K подписчика
Правила сообщества
Здравствуйте, я РЗК «Марьята», ВМС Норвегии.
Меня ненавидят все офицеры-подводники Краснознамённого Северного флота РФ.
Можно к вам в песочницу?


Однако нет. Марьята.
Они в трех поколениях ЕМНИП.

Времена меняются. Допуска к ГТ больше нету (хвала богам)))
Только хотел писать, что про «Машку» забыли
а как же мы тогда.
Мне больше интересно что же у него ниже ватерлинии, что он так высоко надо водой плывет.

Только хотел сказать про Бонда, где подлодку украли.))
Скорее всего вы зря надеетесь. Эти кораблики редко видятся с российским надводным флотом ведь основное тактическое свойство подлодок — скрытность а эти кораблики пытаются их находить. Но если подлодка плавает вместе с парочкой ракетных крейсеров то находить ее нет смысла.
Сюрприз — у подводных лодок есть крылатые ракеты. ПКР.
Вы бы не бесились, а читать пробовали. Где у меня вообще уничижительные характеристики вы увидели? Что плохого в пожелании, чтобы у России были средства защиты? Или это российские корабли плавают у берегов США?
Ну так наши лодки плавают, чтобы честно отстреляться ядерными ракетами по городам, а пиндосы плавают, чтобы подло не позволить нам это сделать!
Вы не умеете в сарказм?
Всё нормально, гражданин.
Где плавают? Наши «стратеги» плавают в Северном ледовитом, а ударные их охранают или гоняют вражеские. Уже давно лодкам не нужно плавать у чужих берегов.
Вы не таитесь, расскажите, где наши лодки бороздят просторы Мирового океана.
Ох уж эти общие слова. «Я здесь и не здесь, я везде и нигде»
Поясню. У военных есть такое понятие — боевая и учебная задача.
Так какие задачи решают ударные лодки у берегов Северной Америки? Правильно, нет у них таких задач на сегодняшний момент. Ибо СССР нужно было чем то топить конвои с техникой и войсками, идущими в Европу. А у России такой задачи нет, так как она с НАТО обычными вооружениями воевать не собирается.
Понеслась душа в рай.
Господа, да это гон натуральный! Скорость распространения звука в воде 1,5 км/сек, что гораздо быстрее чем в воздухе. при всем при этом сигнал до ПЛ будет идти аж 4 минуты и 4 обратно. И того 8 мин на обнаружение. При скоростях ПЛ от 60 до 70 км/ч площадь возможного нахождения составит 270,55 км.кв. Супер точная и эффективная система. Ок. Будут буржуи наводиться и работать по площадям.
Видно по тому, что система крайне эффективная, кораблей таких они больше 5-ти не построили. Это из серии — ой кто-то поплыл. Не уверен что «армата разбирает абрамс за секунды» но точно знаю что не всё золото что блестит. Невидимок «Стелс» мы уже боялись и видели. ЗРК С-125М «Нева» нам в этом могла помочь ещё с 1961 года.
ПЛ на таких скоростях не ходят) Только на испытаниях.
При скорости выше 12 узлов, винты начинают давать пузыри, которые ой как далеко видно и слышно. Плюс кильватерный след.

Секретные подводные лодки ГУГИ в Арктической экспедиции

Подводная лодка специального назначения «Оренбург» в базе

АГС «Лошарик» у пирса в Оленьей Губе
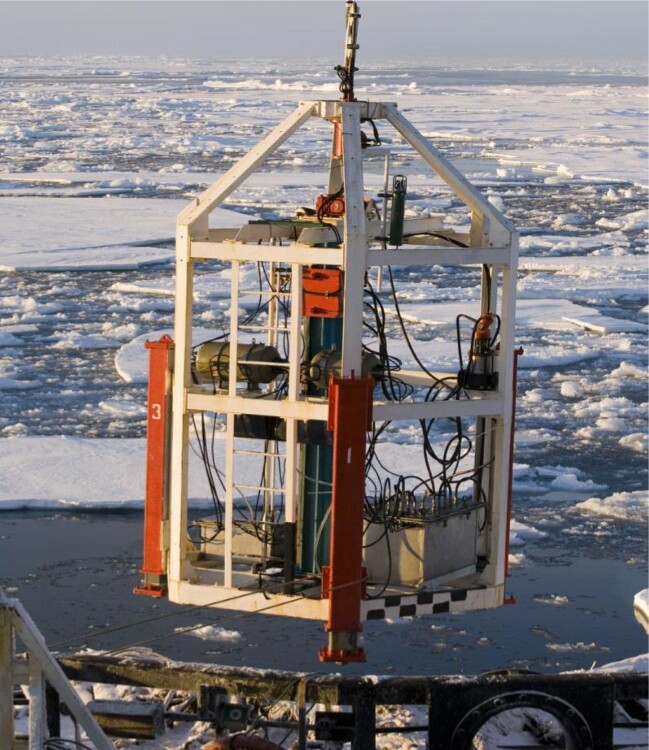
Донный буровой станок ГБУ-2

Ледокол «Капитан Драницын» в Арктике
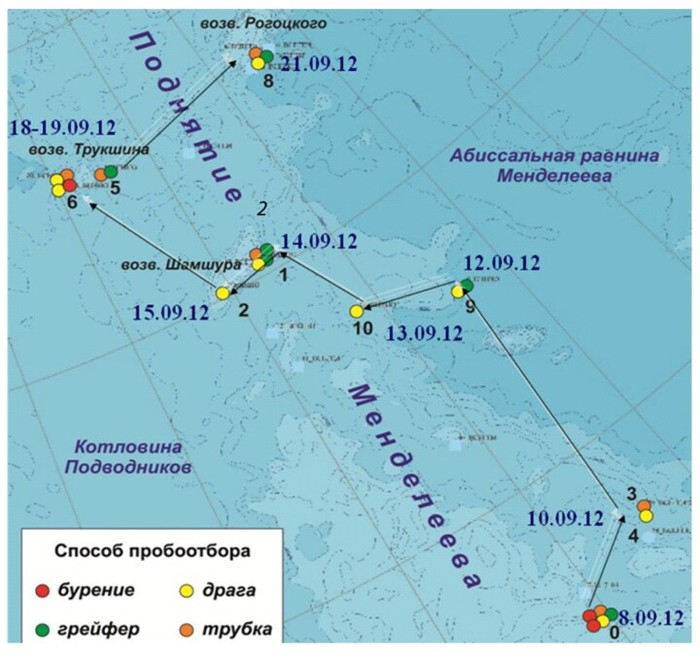
Таким образом, можно отметить, что секретные подводные лодки ГУГИ, предназначенные для выполнения спецопераций и проведения исследований в интересах Министерства обороны РФ, отлично показали себя во время арктической экспедиции «Севморгео» в 2012 году благодаря своей современной исследовательской аппаратуре и оборудованию. Еще один плюс в пользу уникальных российских технологий.
Научные суда в системе разведки НАТО

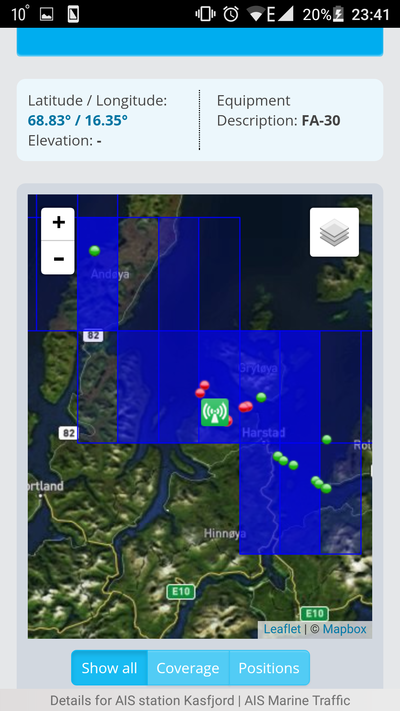
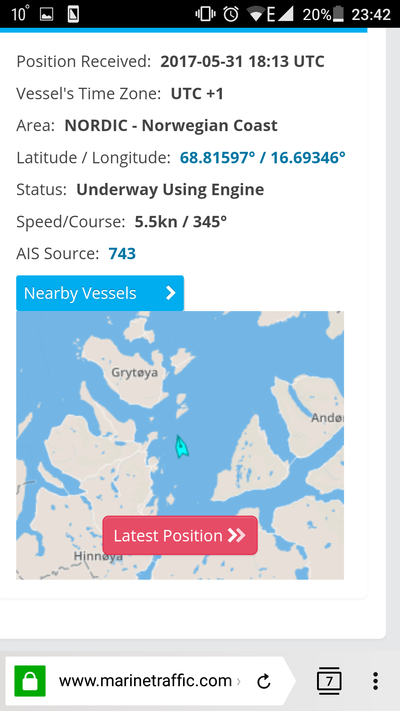
НИС Свердруп-2 Норвегии
Свердруп-2 выполняет океанографические исследовательные работы для научных институтов и министерства обороны Норвегии. Оно также привлекается для ведения разведывательной деятельности в Баренцевом море. В числе оборудования, которое может использоваться для слежения за деятельностью подводных лодок РФ, есть протяженная буксируемая гидроакустическая антенна SURTASS, которая находится на вооружении кораблей гидроакустической разведки НАТО. При помощи данной антенны судно способно обнаружить подводную лодку на дистанции 350 км. Используя низкочастотный гидролокатор LFA можно существенно увеличить это расстояние.

Сбрасывание гидроакустических буев — следящих устройств, способных обнаружить и «записать» подводную лодку

НИС Эгер Норвегии
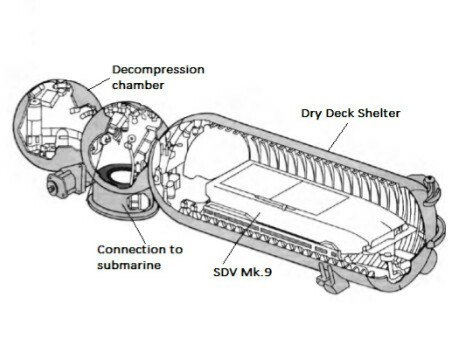
Подводная лодка (SSGN) как платформа для спецопераций

SSGN типа «Ohio» при выполнении специальных операций могут нести до двух контейнеров сухого типа — Dry Deck Shelter (DDS), которые вмещают в себя до 8 пловцов, снаряжение, аппарат SDV и различное дополнительное оборудование.


НПА REMUS-600. Внешний вид
В 2015-2017 годах производились морские испытания универсального модуля запуска и стыковки подводных аппаратов на борту подводной лодки класса SSGN » Ohio». Данный модуль разрабатывался компанией General Dynamics Electric Boat и планируется на вооружение перспективных подводных лодок SSN «Virginia Fl. V (VPM)» и SSGN «Ohio». С его помощью подводные лодки смогут стать носителями различных подводных аппаратов вроде Sea Horse, REMUS-600, Marlin, Bluefin и глайдеров, а также смогут осуществлять постановку быстроразвертываемой сети гидрофонов.

Модуль ULRM на стенде
Модуль будет разворачиваться из ракетных шахт подводных лодок. Он состоит из выдвижного и гидравлического устройства, ложемента и стыковочного конуса. В походном положении модуль находится внутри ракетной шахты в свернутом виде. При необходимости запустить НПА открывается крышка шахты и выдвижное устройство при помощи гидравлики поднимает ложемент с аппаратом либо контейнером полезной нагрузки и переводит его в горизонтальное положение. Производится отстыковка. Существует вариант системы для развертывания из торпедных аппаратов подводной лодки.

Охота за подводными лодками. Гидрология войны — часть вторая.
Всем привет. Совсем не ожидал, что предыдущая статья на эту тему вызовет у читателей такой интерес. Как и обещал, я продолжу, и в этот раз напишу о зонах конвергенции и о том, как гидрологические условия оказывают влияние на тактику ведения противолодочной борьбы.
Ранее я уже писал о том, как звук распространяется под водой. О звуковых лучах, о факторах, оказывающих влияние на их распространение и о том, что такое рефракция или подводный звуковой канал можно почитать в предыдущем посте.
Рис. 1. Подкильная ГАС AN/SQS-53, устанавливаемая на эсминцах и крейсерах ВМС США. Сканирует окружающую среду на наличие подводных целей. Обеспечивается работа в пассивном и активном режимах.
Зоны конвергенции — это так называемые дальние зоны акустической освещенности (ДЗАО). Интенсивность звука, приходящего от удаленного источника, в ДЗАО значительно выше, чем в соседних областях. Звуковой луч, искривляющийся книзу (или преднамеренно направленный вниз), достигает оси глубоководного звукового канала и принимает горизонтальное направление, после чего начинает плавно отклоняться в сторону поверхности моря. Отклонение звуковых лучей кверху происходит, если скорость звука у дна моря выше, чем у поверхности. Разница составляет, как правило, 9 м/сек.
Пучки звуковых лучей, достигнув поверхности, образуют зоны с повышенной интенсивностью звука, имеющие форму колец, которые и называются ДЗАО или зонами конвергенции. Удаленность ДЗАО от источника звука зависит от типа гидрологии и в Северной Атлантике она составляет, в среднем, 30 миль, а в некоторых районах Норвежского моря — 14-18 миль. Ширина ДЗАО на поверхности воды равна примерно 10% от ее удаленности от источника звука. Отразившись от поверхности моря, звуковые лучи могут повторить свою траекторию и снова выйти к поверхности во второй и даже третьей ДЗАО.
Чтобы в полной мере использовать преимущества ДЗАО, необходимы очень мощные гидролокаторы, в то время, как пассивные шумопеленгаторные станции в меньшей степени подвержены воздействию потерь при распространении звука, и способны более эффективно отслеживать контакты в зонах конвергенции.
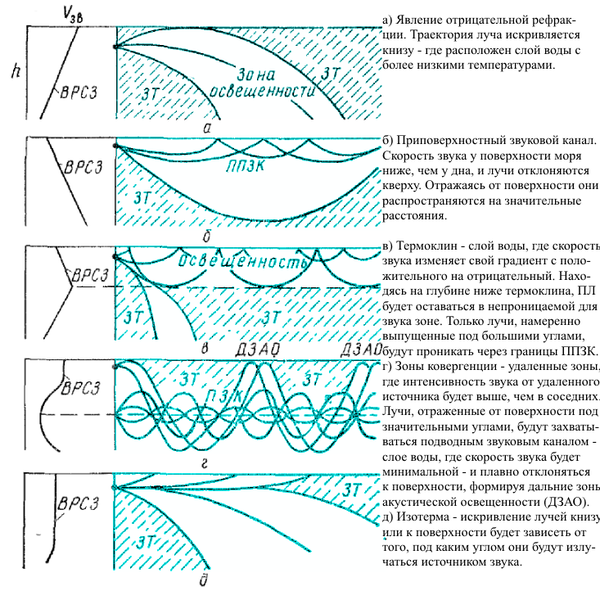
Рис. 2. Типы вертикального распределения скорости звука (ВРСЗ) и характерные картины искривления звуковых лучей.
Вопрос: если Вы заинтересовались этой темой, то попробуйте отгадать, на какой глубине должна находиться подводная лодка, чтобы иметь возможность обнаружить надводный корабль на максимально возможной дистанции, если в районе с положительным градиентом скорости звука наблюдается термоклин на глубине 55 метров? (Рис. 2. В)

Рис. 3. Гидролокатор переменной глубины погружения, который буксируется специальным устройством на надводных кораблях.
В противолодочных операциях, как правило, задействован большой контингент разнородных маневренных и стационарных сил. Самолёты, которые для установления и поддержания контакта с подводной лодкой используют РГАБ (см. первый пост), получают вводный инструктаж или исследуют гидрометеорологические условия в районе самостоятельно. Для точного определения оптимальной величины заглубления гидрофонов и дистанции между отдельными РГАБ экипажи производят батитермические измерения при помощи специальных буёв — AN/SSQ-36. Это позволяет им вести наиболее эффективный поиск целей в районе с заданными условиями.
Вертолеты, использующие буксируемые заглубляемые ГАС (см. третий пост), в случае наличия сезонного термоклина действуют парами (и это как минимум) и производят поиск целей в двух разных слоях воды: выше и ниже слоя скачка (термоклина), соответственно.
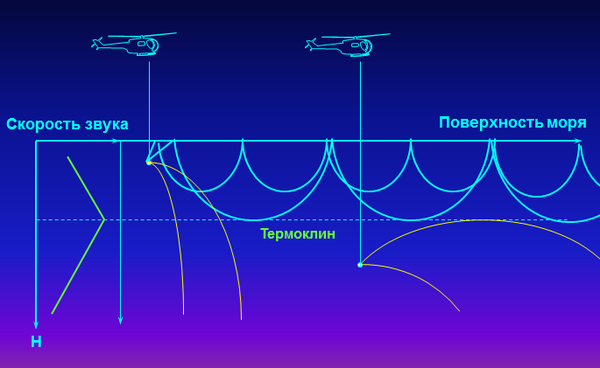
Рис. 4. Схема поиска ПЛ двумя вертолётами в условиях наличия приповерхностного звукового канала и горизонта слоя скачка (термоклин).
Надводные корабли на противолодочных рубежах или в составе охранения, оснащаются активными или пассивными ГАС. Скорость корабля, ведущего гидролокационный поиск при помощи носовой антенны (рис. 1), в условиях высокого уровня реверберации существенной роли не играет. Если же уровень реверберации низкий и корабль ведет поиск в условиях сильного волнения, то качка и собственные шумы корабля приводят к снижению эффективности его гидролокатора. Поэтому в условиях сильного волнения, когда корабль лежит на курсах против волны, ему рекомендуется движение на высокой скорости, а на курсах, обеспечивающих более благоприятные условия для использования гидролокатора — малая скорость.
Подводные лодки, используя неоднородность океанической среды и изменяя глубину погружения, способны эффективно снижать свою заметность и повышать показатели скрытности. Поэтому большинство надводных кораблей также оснащаются гидроакустическими антеннами переменной глубины погружения (Рис. 3), для обследования так называемых зон тени. Величина заглубления антенн выбирается исходя из лучевой картины и гидрологических условий в районе. Выбор глубины погружения антенны позволяет свести к минимуму воздействие различных помех и помогает найти оптимальную глубину для прослушивания водного пространства.
Рассмотрим влияние гидрологических условий на тактику применения оружия на примере использования глубинных бомб. Для того, чтобы максимально эффективно использовать это оружие, необходимо знать глубину погружения подводной лодки. При наличии термоклина на небольшой глубине и разделении пучка звуковых лучей, активными ГАС определить, какая часть лучей освещает подводную лодку, невозможно. Определить глубину погружения противника поможет знание гидрологических условий и их влияние на маневрирование ПЛ и гидролокатор корабля.
Для уклонения от глубинных бомб ПЛ, вероятнее всего, будет погружаться под теомоклин, где дальности обнаружения невелики, и лодка может маневрировать на высоких докавитационных скоростях. Подтверждение того, что ПЛ находится ниже слоя скачка, служит примерное совпадение дальности, на которой она обнаружена, с ожидаемой дальностью обнаружения под слоем скачка. Подводная лодка, обнаруженная на дальности, значительно превышающей дальность обнаружения под слоем скачка, с полным основанием может считаться находящейся в этом слое. В мелководном районе подводная лодка, намеревающаяся уклониться от атаки, используя высокую скорость хода, может находиться в непосредственной близости от дна.