Принцип действия и устройство навигационных эхолотов
Среди средств наблюдения, связи и управления в подводной среде особое место занимают гидроакустические станции (ГАС) активного действия, к которым, в частности, относятся навигационные эхолоты и гидролокаторы.
Навигационный эхолот предназначен для измерения глубин под килем судна-носителя, а гидролокатор — для определения трех координат подводного объекта, находящегося в стороне от судна-носителя: дистанции Д, истинного пеленга (курсового угла) и угла цели θ (угла в вертикальной плоскости).
Измерение дистанции. Принцип измерения дистанции до подводного объекта с помощью эхолота или гидролокатора заключается в измерении промежутка времени между посылкой зондирующего импульса в толщу воды и приходом отраженного от объекта (препятствия) эхо-сигнала к приемнику. Зная скорость распространения звука в воде, можно определить дистанцию до подводного объекта по формуле
(3.5)
где с0 — расчетное значение скорости звука в воде (1500 м/с).
Таким образом, задача об определении глубины под килем или дистанции до подводного объекта сводится к измерению весьма малого промежутка времени Δt. Конструктивно она может быть решена различными методами с применением в качестве индикаторных устройств электромеханических указателей глубин, самописцев и цифровых электронных указателей глубин.
Электромеханические указатели глубин предназначаются для визуального отсчета глубин и управления посылками акустических импульсов. Они используются только в эхолотах.
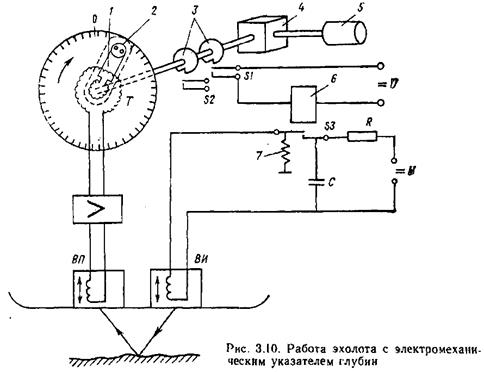
Указатель глубин с механической линейной разверткой времени (рис. 3.25) состоит из вращающейся планки 1 с неоновой лампочкой 2, трансформатора T, кулачков 3 с контактами S1 и S2, электродвигателя 5, коробки скоростей 4 и шкалы, разбитой в единицах глубины. Эхолот с электромеханическим указателем глубины работает следующим образом.
Электродвигатель 5 вращает с постоянной частотой вращения планку 1 с неоновой лампочкой 2 и кулачком 3. В момент прохождения неоновой лампочкой нулевого деления шкалы кулачок 3 размыкает контакт S1, при этом разрывается цепь питания обмотки посылочного реле 6 и его контакты S3 замыкаются под действием пружины 7. Конденсатор С разряжается через обмотку вибратора-излучателя ВИ. При этом образуется колебательный контур, в котором возникают мощные затухающие колебания, и электромеханический преобразователь излучает в воду ультразвуковой импульс большой интенсивности.
Зондирующий импульс в основном максимуме диаграммы направленности распространяется ко дну, а в боковом — к вибратору-приемнику ВП. Боковой акустический импульс в вибраторе-приемнике преобразуется в слабый электрический сигнал, который после усиления поступает на первичную обмотку трансформатора T. Со вторичной обмотки трансформатора напряжение подается на неоновую лампочку 2, Вспышка ламп очки практически совпадает с нулем шкалы.
Рис. 3.26. Работа эхолота с электромехани- ческим указателем глубин
Зондирующий импульс в пределах основного максимума диаграммы направленности доходит до дна, отражается и принимается вибратором-приемником ВП, Слабая э. д. с, возникающая й обмотке вибратора, после усиления заставит вспыхнуть неоновую лампочку против деления шкалы, соответствующего измеряемой глубине. При следующем обороте планки рассмотренный процесс повторится. Из-за быстрого вращения планки с неоновой лампочкой нулевые вспышки и отметки глубин сливаются, и по шкале можно непрерывно отсчитывать глубину под килем судна.
Применение неоновой лампочки вызвано тем, что она практически безынерционна, т. е. мгновенно зажигается при подаче напряжения и мгновенно гаснет при отсутствии его; это обеспечивает точный отсчет глубин по шкале. Частота вращения неоновой лампочки должна быть строго постоянной для данного диапазона глубин; это поддерживается с помощью автоматического регулятора частоты вращения электродвигателя.
При регистрации малых глубин необходимо «гасить» нулевую отметку. Это вызвано тем, что накопительный конденсатор разряжается на нулевой отметке, а для фиксации глубины под килем зарядиться не успевает. Схема гашения нулевой отметки действует от контактов S2, которые в момент, соответствующий посылке импульса, отключают накопительный конденсатор от цепи разряда. После прохождения неоновой лампочкой нулевой отметки шкалы схема разряда восстанавливается и импульсы, отраженные даже с малых глубин, отмечаются указателем эхолота.
Самописцы предназначены для автоматической записи измеряемых глубин. В настоящее время наибольшее распространение получают самописцы с линейной механической разверткой в виде бесконечной ленты с закрепленными на ней пером и кулачком (рис. 3.26). Электропривод заставляет перо двигаться с постоянной скоростью по электротермической бумаге. В момент прохождения пером нулевого деления шкалы посылочные контакты срабатывают и подключают импульсный генератор к обмотке вибратора-излучателя, который посылает в воду зондирующий импульс. К моменту возвращения эхо-сигнала от подводного объекта перо перемещается вдоль шкалы на некоторое расстояние, прямо пропорциональное глубине (дистанции). Усиленный электрический сигнал прожигает бумагу, регистрируя отметку глубины. Принцип фиксации нулевой отметки и гашения в самописце такой же, как и в электромеханическом указателе глубин.
Рис. 3.27. Работа эхолота с самописцем
Шкалы индикаторов рассчитывают на определенные глубины и дистанции. Масштаб шкалы определяется пределами значений измеряемых величин, а также шириной бумажной ленты самописца. В индикаторах обычно предусматривается несколько диапазонов, измерение на которых начинается с нуля, и поддиапазон, на котором «просматривается» слой воды с определенной глубины.
Цифровой указатель глубин (ЦУГ) применяют при электронном методе измерения промежутка времени между посылкой и приемом сигнала. ЦУГ состоит из преобразователя типа «время – цифра» (ПВЦ) и цифрового табло.
Преобразователь «время – цифра» преобразует промежуток времени в прямо пропорциональное число импульсов, соответствующее глубине. Структурная схема ЦУГ приведена на рис. 3.27. Генератор счетных импульсов ГСИ вырабатывает счетные импульсы с частотой повторения fп = 7500 Гц, которые поступают на вход схемы совпадения СС. Период следования, а значит, и цена одного счетного импульса соответствуют глубине
В момент излучения блок посылок БП вырабатывает импульс посылки, который поступает к задающему генератору ЗГ и триггеру управления ТУ. Последний сбрасывает счетные декады СД с цифрового табло в нулевое положение. Одновременно триггер управления выдает на схему совпадения разрешающий сигнал, и с этого момента счетные импульсы начинают поступать на счетную декаду десятых долей (0,1).
Рис. 3.28. Работа эхолота с цифровым указателем глубин
Задающий генератор вырабатывает мощный импульс, а вибратор-излучатель осуществляет посылку. Счетные декады подсчитывают счетные импульсы до тех пор, пока отраженный ото дна эхо-сигнал не попадет на вибратор-приемник и после усиления не поступит в триггер управления. Последний снимает разрешающий сигнал со схемы совпадения, и счет импульсов прекращается.
Одновременно импульс триггера управления включает цифровое табло, и подсчитанный счетными декадами результат подается через дешифратор на цифровое табло ЦТ.
3.2.3 Лаги
Лаги предназначены для измерения скорости судна относительно поверхности воды.
В зависимости от принципа действия, лаги делятся на три вида: гидроакустические, индукционные и гидродинамические.
С проблемой измерения глубин под килем корабля человек столкнулся во время первых же плаваний. Это требовалось морякам не только для того, чтобы обезопасить корабль от посадки на мель, но и для определения своего места по рельефу дна, а также для уточнения навигационных карт. Первым инструментом для замера глубины под килем служило весло или шест с нанесенными на нем делениями, называемый футштоком (от немецкого – рейка с делениями). На судах Древнего Египта, совершавших плавание по Нилу, для измерения глубин применялся лот. Всё его устройство состояло из груза и лотлиня, к которому он крепился. В лотлинь вплетались отметки – марки мер глубины – саженей и футов. (1 фут = 0,3 метра; 1 сажень = 6 футов = 1,83 метра) Наблюдатель, или лотовый, как его называли становился на нос и забрасывал груз вперед по ходу судна. Когда груз касался дна, а лотлинь принимал вертикальное положение, по марке замечалась глубина под килем. О таком способе измерять глубины вблизи берега упоминал еще в 5 веке до н. э. древнегреческий историк Геродот. В течение многих веков задачи измерения глубины решались с помощью ручных лотов. Большие глубины измерялись лотами ещё древними греками. Во 2 веке до н.э. грек Посейдонзамерил в Средиземном море наибольшую по тем временам глубину – 1832 метра (максимальная глубина – 4480 метров). Мореплаватели той поры отмечали, что если при плавании по Средиземному морю по направлению к Египту глубина под килем судна уменьшается до 100 саженей (183 метра), то до Александрии остался один день пути. Успешно использовали метод уточнения места по глубинам и русские моряки при входе в дальневосточную бухту Золотой Рог в условиях плохой видимости. С помощью лота усовершенствованного Петром 1 штурман Алексей Пушкарев в и горный заседатель Никита Карелин в 1798 г. вполне успешно выполнили промеры озера Байкал, при этом наибольшая глубина была зафиксирована 1238 метров. В молодой русский физик Э. Х. Ленц во время кругосветного плавания на шлюпе «Предприятие» под командованием О. Е. Коцебу проводил глубоководный промер и исследование посредством специальной лебедки с самодвижущимся тормозом. В 1868 г. на корвете «Львица» под командованием капитан-лейтенанта Ф. Н. Кумани проводился глубоководный промер Черного моря, во время которого был испытан электролот, разработанный Э. Х. Шнейдером. Лот опускали на изолированном медном кабеле. При ударе о дно отделяющийся груз замыкал электрическую цепь и включал звонок, что служило сигналом о достижении грузом дна. Однако печальная судьба многих дореволюционных русских открытий и изобретений постигла и эти технические решения. В 1872 г. У. Томсон получил патент на глубоководную промерную лебедку с автоматическим тормозом (Ленца), проволочным лотлинем (Шнейдера) и лотом с самосбрасывающимся грузом (Петра 1) и в экспедиция под руководством И. Б. Шпиндлера при промере Черного моря уже использовала эту так называемую глубомерную машину Томсона. Попытки использовать лот для измерения больших океанских глубин делались ещё во времена Великих географических открытий, но большей частью они заканчивались неудачно: либо лотлинь обрывался, либо оно оказывался слишком коротким. Кроме того, с увеличением глубины трос становился тяжелее прикрепленного к его концу груза и поэтому было трудно определить момент касания грунта грузом, а, следовательно, замер глубин был неточен. Наряду с этим на измерение больших глубин затрачивалось очень много времени. Так измерение глубины в требовалось затратить не менее 5 часов. Известны лоты, которые не только измеряли глубины, но и вырабатывали сигналы, предупреждающие мореплавателя об опасности. Так в конце 19 века на кораблях различных стран использовался лот-предостерегатель Джемса,получивший название «подводного часового». Его особенность состояла в том, что на конце линя крепился не просто груз, а металлическое устройство, по конструкции напоминающее бумажного змея. Такой змей буксировался на определенной глубине. Его крепление с линем было устроено таким образом, что при касании грунта натяжение линя ослабевало и змей всплывал, что было сигналом об уменьшении глубины под килем до значений, меньших, чем вытравленная длина линя. Такой лот не только предупреждал об опасности, но и помогал отыскивать нужные глубины, например для установки вех. Использовался он на глубинах до 50 метров при скорости до 15 узлов. Нужды мореплавания и расширение исследовательских работ в морях и океанах требовали изыскания новых методов и способов, которые обеспечивали бы достаточную точность и непрерывность измерений и не имели бы ограничений по диапазону измеряемых глубин. На помощь ученым и инженерам пришел звук. Идея о возможности измерения расстояния по времени распространения звуковых волн высказана давно. Впервые метод эхолокации был практически подтвержден в 1804 году академиком Я. Д. Захаровым. Совершая один из первых в истории исследовательский полет на воздушном шаре, он крикнул в рупор в сторону земли, получив через 10 секунд эхо, определил по скорости распространения звука в воздухе, что шар находится на высоте 1700 метров. Однако потребовалось более100 лет, чтобы достичь в этом вопросе практических результатов. Только в начале 20 века с появлением простых и мощных излучателей звуковых колебаний и чувствительных приемников метод эхолокации в измерении глубин получил распространение. Большое значение для создания ультразвуковых эхолотов имели исследования по направленному излучению ультразвука в воде, проведенные русским инженером К. В. Шиловским в 1912 году. На их основе Шиловский совместно с известным французским физиком П. Ланжевеном получил патент: «Описание аппаратов и способов их применения для подачи направленных подводных сигналов и для локации подводных препятствий». Ланжевен создал и испытал в проливе и Средиземном море первый ультразвуковой эхолот. Конечно, он имел довольно отдаленное сходство с современными точными и надежными измерителями глубины. И это понятно. Электричество, электротехника и электроника только начинали развиваться, и нерешенных проблем было много. В то время было ещё не ясно, какую энергию необходимо сообщить этим колебаниям, чтобы они могли достичь дна и вернуться к приемнику; хватит ли чувствительности у приемника, как точно измерить промежуток времени распространения сигнала по трассе излучатель – дно – приемник, в каком виде должна представляться информация о глубине. Открытие магнитострикционного эффекта позволило создать надежный излучатель акустических колебаний – вибраторы. Суть эффекта заключается в способности отдельных элементов (никеля, железа, кобальта и др.) менять свои линейные размеры при изменении окружающего их магнитного поля. Магнитострикционный эффект используется в излучающих антеннах эхолотов для преобразования колебаний магнитного поля, формируемого в схеме эхолота, в механические. Механические колебания частиц воды устремляются в сторону дна, отражаются и приходят к приемной антенне эхолота. Здесь происходит обратный магнитострикционный эффект – под действием механических колебаний стержень (например из никеля) изменяет свои размеры, что приводит к изменению напряженности магнитного поля, которое затем преобразуется в электрический сигнал. Теперь только остается замерить промежуток времени между посылкой и приходом колебаний и, зная скорость распространения звука в воде, рассчитать глубину под килем корабля.
2. Принцип работы и основы построения эхолотов
Глубина, измеряемая эхолотом,определяется из соотношения:
С – скорость распространения звука в воде [м/с]; t – время прохождения звука до дна и обратно [с]. Звук распространяется в воде со средней скоростью 1500 м/с. Таким образом, время прохождения сигнала до дна и обратно будет измеряться секундами для больших глубин и долями секунд для малых. Для измерения с необходимой точностью таких малых временных интервалов и преобразования их в значения глубины в состав эхолота входят специальные индикаторы – самописцы и цифровые указатели. В самописцах производится автоматическая непрерывная регистрация измеренной глубины на специальную электротермическую бумагу. В цифровых указателях глубины (ЦУГ) используется преобразователь в котором промежуток времени между моментами посылки зондирующего импульса излучающей антенны и моментом приема преобразуется в пропорциональное соответствующей глубине число счетных импульсов. Современные эхолоты – это сложные электронные приборы, обеспечивающие измерение глубин под килем корабля в любых районах океана. В настоящее время существуют различные эхолоты, типа: НЭЛ –навигационные, ГЭЛ – глубоководные, ПЭЛ – промерные, РЭЛ – речные. На отечественных кораблях и судах для обеспечения навигационной безопасности плавания устанавливают эхолоты унифицированного ряда состоящего из моделей которые обеспечивают надежное измерение глубины на кораблях любого водоизмещения – от катеров до авианосцев. Эхолоты рассчитанные на измерение больших глубин – 6000 и 3000 метров соответственно, имеют 2 рабочие частоты излучения. При этом измерение глубины на поддиапазонах производится высокочастотным каналом, а глубины свыше 400 метров – низкочастотным. Это обусловлено тем, что высокочастотные колебания обеспечивают измерение глубины при сильной аэрации воды, т. е. когда вода насыщена пузырьками воздуха, что особенно характерно для мелководных районов; а низкочастотные колебания имеющие меньший коэффициент затухания, обеспечивают надежное измерение больших глубин. Кроме того, для обеспечения работы низкочастотного канала требуются генераторы большой мощности и антенны, имеющие значительные размеры. Использовать их на малоразмерных кораблях прибрежного плавания нецелесообразно. Эхолоты построены по одновибраторной схеме, т. е. одна антенна используется как излучатель и как приемник. Такой режим работы обеспечивает специальное коммутирующее устройство. При длительной непрерывной работе самописца на бумаге записывается профиль морского дна под килем корабля. В эхолоте предусмотрена автоматическая подача звукового сигнала о том, что корабль вышел на заданную глубину. Эта задача решается с помощью прибора сигнализации глубины и ревуна. Особенностью эхолотов является возможность подключения к ним до 4 х антенн. Дополнительно антенны подключают, как правило, на крупногабаритных кораблях и судах, на которых при следовании узкостями, каналами и фарватерами необходимо знать глубину под килем не в одной точке, а в разных. Наряду со своим основным назначением – измерять глубину и предупреждать об опасности – эхолот в ряде случаев, например в местах с характерными глубинами и в районах с большими их перепадами, помогает штурману уточнять координаты. Эхолоты позволили на только повысить безопасность плавания, но и помогли составить точные карты рельефа морского дна, необходимые как для мореплавания, так и для решения других задач, связанных с изучением морей, океанов и использования их богатств.
Эхолот
Навигационный эхолот предназначен для измерения, индикации и регистрации глубин. Условия работы: -Температура окружающего воздуха 0
40°; -Температура воды −2°
+32°; -Влажность воздуха до 98%; -Скорость хода до 35 узлов; -Бортовая качка до 20° (при измерении глубин до 2000 м); до 10° (до 4000 м); до 5° (свыше 4000 м).
Диапазон измеряемых глубин: 1 – 6000 м (по самописцу); 1 – 3000 м (ЦУГ); 2000 – 6000 м (ЦУГ + самописец).
4 шкалы измерения глубин: 0 – 0 – 0 – 0 –
В самописце используется электротермическая бумага (ЭТБ) с шириной рабочего поля 200 мм. Длина ленты в рулоне 20 метров. Скорость протяжки ЭТБ от 60 до 0,5 мм в мин. Индикация глубины на ЦУГ: 0,1 м для ВЧ канала; 1 м для НЧ канала. Имеется возможность выдавать информацию о глубине залегания звукорассеивающих слоёв. Наличие световой и звуковой сигнализации о выходе на заданную глубину: 1;2;5;20;50;100 метров. Предельные инструментальные погрешности измерения глубин не превышают:
А. Самописец: Н 20 м ±1,5% измеренной глубины;
Б. >ЦУГ: Н 20 м ±1% измеренной глубины;
В. Прибор сигнализации глубины: Н=1 м ±0,3 м;
Н>5 м ±5% измеренной глубины;
Возможность введения в показания приборов 4 и 11 значения фактической скорости распространения звука в воде в пределах 1460 – 1530 м/с. При излучении в НЧ канале производится автоматическая регулировка излучаемой мощности. При излучении в ВЧ канале измерение может производиться выборочно с одной из четырёх точек (нос, корма, пр/б, л/б) при установке пр.1 в указанных местах. Питание однофазный переменный ток 220 В; 127 В частотой 50 Гц. Время готовности эхолота не более 30 секунд (от момента включения до получения информации о глубине). Время непрерывной работы эхолота 60 часов.
Пр. 1 и 1А гидроакустические антенны эхолота и служат для преобразования электрической энергии в акустическую и наоборот. Состоит из: блока пьезоэлементов, крышки и кабеля. Пр.16 предназначен для размещения электронных блоков и связи приборов эхолота между собой. Состоит из: комбинированных блоков, генератора НЧ, накопителя ёмкости, коммутирующего устройства, реле коммутации антенн ВЧ канала, элементов делителя мощности ГНЧ, счетчика моточасов, сетевого выключателя, предохранителей и индикаторных ламп. Пр.4 предназначен для регистрации измеряемой глубины на ЭТБ, формирования синхронизирующего импульса запуска и управления работой эхолота. Состоит из: механизма развертки (У1) с устройством формирования запуска (К3), привода (У2), усилителя записи (У3), формирователя нулевой отметки (У4), формирователя условной отметки (У5), и органов управления и коммутации. Пр.4Б предназначен для управления работой эхолота при отключенном пр.4 и ввода в показания эхолота значения скорости распространения звука в воде. Пр.4Г предназначен для включения сигнализации о выходе объекта на заданную глубину. Состоит из: селектора импульсов 1 (У1), формирователя (У2), селектора импульсов 2 (У3) и органов управления. Пр.11 предназначен для индикации измеренной глубины и установленного значения скорости звука в воде. Состоит из: платы, индикаторных ламп и указателя измерения. Пр.Я предназначен для соединения приборов 1 и 1А с пр.16
Калибровка эхолота
-Выбрать ровное место с глубиной и хорошим грунтом, убедиться в отсутствии крена и дифферента; -Отрегулировать самописец и ЦУГ; -Измерить ручным лотом глубину места в районе расположения вибратора с одного, а затем с другого борта корабля с предельно возможной точностью (до 0,01 м). Одновременно замерить глубину по эхолоту; -Вычислить среднее арифметическое значение глубин Нл и Н; -Сравнить полученные значения и рассчитать поправку: Нр = Нл – Нэ; -Записать в журнал ЭНП и в дальнейшем учитывать при исправлении глубин.
Тракт управления эхолота
Для управления работой вибратора, т. е. для перевода его из режима излучения в режим приема, имеется специальное коммутирующее устройство. В качестве коммутирующего устройства может быть использовано электромагнитное реле или коммутирующий трансформатор. Импульсы ультразвуковой частоты вырабатываются импульсным генератором. Управление посылками осуществляется электромагнитным реле и посылочными контактами. Мощный импульс ультразвуковой частоты поступает одновременно на подмагничивающее устройство и коммутирующий трансформатор. В подмагничивающем устройстве ультразвуковой импульс преобразуется в импульс постоянного тока и в виде импульса тока подмагничивания подается на коммутирующий трансформатор. Под действием импульса тока подмагничивания индуктивное сопротивление обмоток коммутирующего трансформатора уменьшается, в результате чего вся энергия ультразвукового импульса, поступившая от импульсного генератора на коммутирующий трансформатор, поступает на вибратор и происходит излучение. Импульс тока подмагничивания кроме управления работой коммутирующего устройства подмагничивает пакеты вибраторов в момент излучения, вследствие чего их КПД значительно возрастает. Отраженный от грунта сигнал индуцирует в обмотке ЭДС, которая подается на коммутирующий трансформатор. Индуктивное сопротивление обмотки коммутирующего трансформатора в промежутке между посылками велико, так как на него не поступает в этот момент ток подмагничивания, в результате чего вся энергия отраженного сигнала выделяется на первичной обмотке трансформатора; со вторичной обмотки этого трансформатора эхосигнал поступает на усилитель, а затем на регистрирующее устройство.
Методы измерения коротких промежутков времени в эхолоте
В основу акустического принципа измерения глубин заложен метод измерения времени, в течение которого импульс акустических колебаний проходит расстояние от излучателя до грунта и обратно от грунта до приемника. Так как за одну секунду звук проходит в воде расстояние около 1500 м, то измерение малых глубин означает измерение малых промежутков времени, равных сотым долям секунды. В настоящее время разработаны методы измерения малых промежутков времени, которые применяют в эхолотах. К ним относятся: -частотно-модуляционный метод; -метод заряда конденсатора пропорционально глубине; -метод среднего значения анодного тока тиратрона, пропорционально глубине; -метод линейной развертки времени.
Из всех методов метод линейной развертки времени получил широкое распространение в эхолотах как наиболее простой, надежный и обеспечивающий автоматическую запись глубин сравнительно простыми средствами. Сущность этого метода состоит в измерении линейного перемещения l отметчика за время Δ t распространения акустических колебаний в воде. При равномерном перемещении отметчика пройденное им расстояние l прямо пропорционально времени Δ t , т. е. l = k Δ t (1) Откуда Δ t = l / k где к – коэффициент пропорциональности. Подставив в формулу h= c Δ t /2 значение Δ t из формулы (1), получим h = cl /2 k Т.е. измеренная эхолотом глубина пропорциональна величине l перемещения отметчика.в качестве отметчиков используется бесконечная лента с укрепленными на ней перьями, вращающийся барабан со спиралями, электронно-лучевая трубка с отклоняющимся лучом, электронный счетчик с цифровой индикацией. В современных эхолотах в качестве индикаторных устройств служат указатели глубин, самописцы с линейной механической разверткой времени и цифровые указатели глубин. Самописцы предназначены для автоматической записи измеряемых глубин. В качестве индикаторов самописца могут быть отметчики с бесконечной лентой или вращающимся барабаном. Электродвигатель через редуктор вращает с постоянной скоростью барабан и кулачек. В момент, когда точка касания струны с токопроводящей планкой находится против нулевого деления шкалы, кулачек с помощью пружины размыкает посылочные контакты, вследствие чего разрывается цепь питания посылочного реле. Под действием пружины замыкаются контакты. Конденсатор, заряженный от источника постоянного тока высокого напряжения, разряжается через обмотку вибратора излучателя, который излучает акустические колебания. Отраженный от грунта сигнал принимается вибратором-приемником, усиливается усилителем и подается на первичную обмотку трансформатора. Со вторичной обмотки трансформатора напряжение поступает на токопроводящую планку и через бумагу на струну барабана. Следовательно, в момент прихода в точке соприкосновения планки и струны через токопроводящую бумагу пройдет ток, оставляя отметку, соответствующую измеренной глубине, которая отсчитывается по шкале линейки. Отметки глубины образуют непрерывную линию, соответствующую профилю дна по направлению движения корабля. Частота вращения барабана, а следовательно, и кулачка может изменяться в зависимости от диапазона измеряемых глубин. Самописец обычно работает в нескольких диапазонах и имеет несколько шкал. Для увеличения масштаба записи глубин на ленте самописца применяется фазировка посылки импульса. Глубины на ленте самописца записываются электротермическим способом. При этом способе применяется трехслойная бумага. Верхний слой серого цвета, покрыт окисью свинца, средний слой черного цвета, имеет волокнистое строение и пропитан графитом. Нижний слой покрыт алюминием. В момент приема на линейку подается электрический импульс напряжением 100В. Током, проходящим через бумагу, выжигается ее верхний слой. Обнажившийся в этом месте в виде точки средний черный слой обозначает измеренную глубину. Цифровой указатель глубин (ЦУГ) применяется при электронном методе измерения малых промежутков времени. ЦУГ представляет собой преобразователь Он преобразует промежуток времени между моментом посылки и моментом приема в пропорциональное число счетных импульсов, соответствующее глубине. Генератор счетных импульсов (ГСИ) вырабатывает счетные импульсы (СИ) с частотой повторения f п=7500Гц, которые поступают на схему совпадения (СС). Период следования, а следовательно, и цена одного счетного импульса соответствует глубине В момент излучения блок посылок вырабатывает импульс посылки, который поступает к задающему генератору и триггеру управления. Триггер управления сбрасывает счетные декады с цифрового табло в нулевое положение. Одновременно триггер управления выдает на схему совпадения разрешающий сигнал, и с этого момента счетные импульсы начинают поступать на счетную декаду десятых долей. Задающий генератор вырабатывает мощный импульс, и вибратор-излучатель производит посылку. Счетная декада десятых долей подсчитывает счетные импульсы и при поступлении десяти счетных вырабатывает импульс с ценой 1м, который подается на счетную декаду единиц. Счетная декада единиц подсчитывает единицы импульсов и при поступлении десяти импульсов с ценой 1м вырабатывает импульс с ценой 10м. Счетные декады десятков и сотен работают аналогично. Отраженный от дна принимается вибратором-приемником и после усиления подается на триггер управления. Триггер управления снимает разрешающий сигнал со схемы совпадения, и счет импульсов прекращается. Одновременно импульс триггера управления включает цифровое табло и подсчитанный счетными декадами результат подается через дешифратор на цифровое табло. Цифровое табло имеет 4 индикатора. Каждый индикатор представляет собой лампу тлеющего разряда, состоящую из цоколя со стеклянным баллоном, в котором имеются анод и 10 катодов в форме цифр от 0 до 9. В зависимости от количества подсчитанных знаков дешифраторы подают напряжение на соответствующие катоды цифровых индикаторов. В эхолоте имеется блок сигнализации, предназначенный для сигнализации (лампочкой и ревуном) прохождения заданной глубины в диапазоне глубин от 5 до 50м. Опорное напряжение, которое определяет длительность задающего импульса, устанавливается с помощью специального потенциометра. Схема блока сигнализации глубины запускается импульсом нуля, поступающим из блока посылок, и задает импульс, длительность которого соответствует времени прохождения заданной глубины. При совпадении длительности задающего импульса и времени между посылкой и приемом импульса схема срабатывает, на ее выходе появляются световой и звуковой сигналы.
Погрешности эхолота
Эхолотам свойственны методические и инструментальные погрешности. Методические погрешности зависят от внешних факторов или возникают непосредственно при работе прибора. Инструментальные погрешности являются следствием конструктивных недостатков и неточной установки или регулировки прибора. К методическим погрешностям относятся: -отклонение фактической скорости звука от расчетной; -погрешность эхолота вызванная наклоном морского дна.
К инструментальным погрешностям относятся: -наличие базы между вибраторами; -нестабильность частоты вращения электродвигателя; -неточная установка нуля шкалы прибора.
Погрешность, обусловленная отклонением фактической скорости звука в воде от расчетной . Скорость распространения акустических колебаний в морской воде является функцией ее солености S , температуры t и гидростатического давления pc . При расчете эхолотов скорость распространения звука в воде принимается постоянной и равной 1500м/с. в различных районах плавания скорость распространения звука неодинакова и колеблется от 1420 до 1548 м/с. отклонение фактической скорости распространения звука с от расчетной с0 для эхолота вносит в измеряемую глубину погрешность δ hc . в этом случае измеряемую глубину необходимо исправить поправкой Поправка может быть автоматически учтена регулировкой частоты вращения электродвигателя времени в соответствии со скоростью звука в воде, либо ручным вводом скорости распространения звука в воде в прибор управления ЦУГ. Погрешность измеряемых глубин, вызванная наклоном морского дна. Современные эхолоты работают в ультразвуковом диапазоне частот и, следовательно, имеют определенную направленность излучения. Погрешность дна пропорциональна измеряемой глубине, даже для небольших глубин (50-100м) может достигать 5м и более. Поправка за наклон дна равна Уменьшить величину погрешности можно уменьшением величины угла направленности вибратора. Погрешность базы между вибраторами. Если в эхолоте используется два вибратора, то при наличии базы L между вибраторами фактическая измеряемая глубина равна Неучет при расчете эхолота базы между вибраторами приводит к появлению погрешности в измеряемой глубине. Разность между фактической глубиной h и измеряемой h 0 эхолотом называется поправкой за базу Поправка всегда отрицательна и должна вычитаться из показаний эхолота, так как эхолот будет всегда показывать глубину больше фактической. Величина погрешность базы между вибраторами убывает с увеличением измеряемой глубины и с уменьшением базы. Погрешность базы имеет заметную величину при глубинах меньше 5-6м. Погрешность вследствие отклонения частоты вращения электродвигателя от расчетной. При расчете регистрирующих устройств эхолота принимается, что время оборота диска указателя или пера самописца соответствует времени измерения максимальной глубины. Следовательно, при данной скорости распространения звука в воде с диск указателя или перо самописца должны делать строго определенное число оборотов. Если фактическая частота вращения n диска или пера будет больше расчетной n 0, то диск или перо повернется на больший угол, а следовательно, эхолот покажет большую глубину, если n n 0, то индикаторы укажут меньшую глубину. Исключение этой погрешности из измеряемых глубин достигается регулировкой числа оборотов электродвигателя с помощью автоматического центробежного регулятора (АЦР). Если погрешность невозможно устранить регулировкой прибора, то вводят поправку за отклонение фактической скорости вращения двигателя от расчетной: Погрешность, обусловленная неточной установкой нуля шкалы прибора. При несовпадении нулевой отметки с нулевым делением шкалы прибора в измеряемые глубины вносится систематическая погрешность, величина которой равна отстоянию нулевой отметки от нулевого деления шкалы прибора. По величине и знаку она постоянна. Ее можно исключить из измеряемых глубин введением поправки или регулировкой прибора. Положение нулевой отметки на шкале глубин регулируется поворотом кулачка или контактной группы формирователя запуска. Влияние качки корабля на точность измерения глубин. При сильной качке корабля эхолот работает неустойчиво, точность показаний снижается и измеряемые эхолотом глубины отличаются от истинных. Это объясняется тем, что при качке акустическая энергия излучения распространяется не перпендикулярно к дну, а под углом, зависящим от угла качки. Кроме того, во время качки в верхнем слое воды образуется большое количество воздушных пузырьков. Влияние качки на работу эхолота можно уменьшить выбором места установки вибратора. Для исключения погрешности на качке отсчет глубин необходимо брать в момент, когда крен и дифферент корабля минимальны. Отклонения в показаниях эхолота в этом случае будут наименьшими.
 (3.5)
(3.5)