- Как работают эхолоты
- Информация на заметку
- 1. Сонары сканируют конусообразно, а не линейно
- Как это работает
- Отражения от поверхности и «слепые» зоны
- Почему это играет роль при …
- 2. Прокрутка экрана не означает движение сонара (или большое количество рыбы)
- Почему это имеет значение при …
- 3. Более толстые линии и повторные возвратные сигналы означают более плотное дно.
- Почему это играет роль при …
- Устройство и основные принципы работы эхолота
Как работают эхолоты
SONAR аббревиатура от “SOund NAvigation Ranging ” что в переводе означает «Звук, Навигация, Определение расстояния». Сонар посылает импульсы звуковых волн сквозь воду. Когда эти импульсы достигают таких объектов как рыба, растительность или дно, они отражаются обратно на поверхность. Сонар измеряет, сколько времени требуется, чтобы звуковая волна достигла обьекта и затем вернулсась обратно. Это тот же принцип, который используют дельфины и летучие мышы. Эта информация позволяет судить о глубине отраженного объекта. Он также измеряет силу возвращаемого импульса — чем тверже объекты, тем сильнее обратный импульс.
Как только получен возвращаемый импульс, отсылается другой. Поскольку звуковые волны движутся со скоростью в одну милю в секунду, сонары могут посылать несколько импульсов в секунду. Deeper PRO, Deeper PRO+ и Deeper CHIRP+ отправляют 15 импульсов в секунду. Возвращающиеся звуковые импульсы преобразуются в электрические сигналы, а затем отображаются, позволяя рыболовам определять глубину и твердость дна, а также любые объекты между ними.
Информация на заметку
1. Сонары сканируют конусообразно, а не линейно
Как это работает
Сонары посылают звуковые импульсы для поиска объектов. Звук распространяется волнами, а не прямыми линиями, и эти волны расширяются конусообразно, становясь все шире и шире.
Большинство сонаров могут управлять конусами звуковых волн, изменяя частоту сканирующего луча. Это важно, потому что в разных промысловых ситуациях различные сканирующие лучи более или менее эффективны.
Широкое лучевое сканирование (обычно от 40 ° до 60 °) отлично подходит для быстрого сканирования больших площадей и получения общей информации о глубине и структуре дна, но точность и детали будут ниже. Широкое лучевое сканирование лучше всего подходит для более мелких вод, потому что чем шире конус покрывает область, тем глубже он сканирует. Это означает, что если вы сканируете на глубине 13,7 м, вы увидите объекты в радиусе 14,3 м.
Сканирование узким лучом (от 10 ° до 20 °) дает более точное изображение, но покрывает меньшую площадь. Это подходит для определения точного местоположения рыбы. Узкое лучевое сканирование также лучше подходит для большой глубины, так как конус не распространяется слишком широко.
Отражения от поверхности и «слепые» зоны
Есть один важный момент, связанный с шириной сканирующего луча, который следует принимать во внимание: в некоторых случаях эхолот не выявляет объекты, которые находятся сразу под поверхностью воды.
Это вызвано отражением волн от поверхности, возникающем при использовании любых эхолотов. Отражение от поверхности происходит потому, что близкая к поверхности вода отражает часть испускаемых эхолотом волн, и эти отражения возникают слишком быстро, мешая эхолоту правильно обработать данные. Отражения могут возникать по ряду причин; чаще всего это волны на поверхности воды, пузырьки, течение и водоросли. Они вызывают сильный гидроакустический шум возле поверхности. Из-за этого и появляются «слепые» зоны, в которых невозможно выявить рыбу.
Количество отражений и размер «слепых» зон можно снизить, повысив частоту сканирования при использовании эхолота. Если вы сталкиваетесь с отражениями от поверхности при работе с Deeper PRO или PRO+, переключитесь на сканирование на более высокой частоте (узкий луч 290 кГц 15°). Если у вас Deeper START, его частота эхолокации 120 кГц предполагает появление отражений от поверхности воды в глубину до 1 м.
Благодаря технологии CHIRP эхолот Deeper CHIRP+ имеет минимальный уровень отражений от поверхности и шума, что обеспечивает точность его показаний даже на глубине 15 см от поверхности воды.
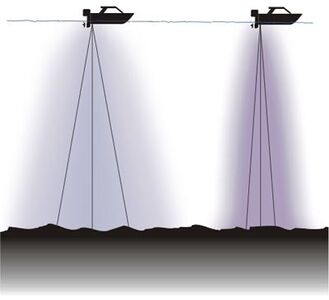
На рисунке ниже приведены 2 ситуации, в которых отражения от поверхности воды могут искажать показатели эхолота (в этих примерах глубина отражений может достигать 1 м вглубь):
- Рыба находится ниже зоны отражений от поверхности. В этом случае отражение испускаемых эхолотом волн от рыбы достаточно сильное и эхолот выявляет ее местоположение (при использовании эхолота Fish Deeper приложение Deeper использует алгоритм, который определяет, рыба это или нет). В результате рыба отображается на экране приложения.
- Рыба находится в зоне отражений от поверхности. Отражения волн эхолота от этой рыбы смешиваются с отражениями от поверхности воды и силы сигнала становится недостаточно для выявления местоположения рыбы. В результате рыба не отображается на экране приложения.
Почему это играет роль при …
При обнаружения рыбы, не рассчитывайте, что каждая рыба, которую Вы отмечаете, находится прямо под вашим сонаром. Вместо этого помните, что они находятся где-то внутри конуса, распространяющегося вашим сонаром. И помните, чем больше глубина , тем шире область, в которой рыба может быть. Если рыба не глубоко, то она находится более или менее под вашим сонаром, особенно если вы используете узкий луч. Если же рыба глубоко, то она может находиться в гораздо более широкой области и намного дальше от расположения вашего сонара.
Совет от Deeper: при ловле рыбы сначала используйте широкий луч, чтобы найти общую область нахождения рыбы, затем переключитесь на узкий луч и просмотрите эту область несколько раз, чтобы получить точное местоположение.
определении структуры и особенностей
Еще один момент, который вы должны понять при поиске — это то, что именно называется мертвой зоной. Ваш сонар будет использовать первую обнаруженную частицу дна, которую он определяет как уровень маркировки дна на экране. Но если конус сканирует впадину, там может быть более глубокая секция, которая не поддается сканированию — эта область является мертвой зоной.
Совет от Deeper: Использование узкого луча минимизирует вероятность того, что на вашем дисплее появится мертвая зона. Когда вы обнаружите впадину, просмотрите ее несколько раз, используя узкий луч.
2. Прокрутка экрана не означает движение сонара (или большое количество рыбы)
В приложение Fish Deeper и многие другие сонары отображают данные на экране с прокруткой справа налево. Справа на дисплее показываются самые последние данные, самые старые — слева. Вы должны помнить, что ваш дисплей будет продолжать прокручиваться, даже если ваш сонар неподвижен, потому что устройство постоянно отправляет и получает звуковые импульсы. Понимание того, как работает просмотр прокрутки действительно важно для понимания данных сонара, которые вы получаете.
Почему это имеет значение при …
Одной из самых частых ошибок при анализе данных полученных с сонара является принятие одной рыбы за большое количество рыб. Вот как это происходит. Вы определяете, что в воде есть неподвижная рыба. Если вы не переместите свой сонар, и рыба останется неподвижной, на экране вы увидите постоянный поток рыбных значков. Естественно Вы подумаете, что обнаружены 4 или 5 огромных монстров. На самом деле, есть только один, но прокручивающийся дисплей делает его похожим на несколько.
Если вы обнаруживаете, что дисплей прокрутки ошибается, попробуйте добавить вертикальный индикатор мигалки (Настройки — Сонар — Вертикальный флешер: Вкл.). Это точно так же, как на дисплее Зимняя рыбалка, показано справа на дисплее. Этот дисплей представляет собой живой канал, который не прокручивается — он показывает, что происходит прямо сейчас под вашим сонаром.
определении структуры и особенностей
Представьте, что вы запустили свой сонар, и теперь вы тяните его обратно, чтобы получить образ подводной структуры. Прекратите тянуть его на несколько секунд, а затем начните снова. Впоследствии вы вернувшись к сканированию заметите явный уклон, но с одним плоским участком посередине. Итак, есть ли на самом деле плоский участок на дне?
Ответ — нет! Это происходит потому, что горизонтальная ось вашего дисплея показывает время, а не расстояние. «Плоская секция», которую вы видите, это когда вы перестали тянуть. Сонар продолжал сканирование и может показаться, что дно плоское, но на самом деле нет.
Совет от Deeper: Чтобы этого избежать, тяните сонар с одинаковой скоростью. Вместо этого вы можете использовать функции отображения с лодки или берега. Они используют GPS для добавления уровней глубины на вашу карту, поэтому нет проблем, если скорость, с которой вы тяните, меняется.
3. Более толстые линии и повторные возвратные сигналы означают более плотное дно.
Ваш сонар способен рассказать вам не только о том, как выглядит структура дна, но и о том, насколько тяжелое дно. Вот как:
Сонары измеряют время, необходимое для возвращения звукового импульса, а также силу сигнала, который возвращается. Это позволяет ему показать степень твердости подводных объектов. Мягкие объекты с низкой плотностью возвращают более слабый сигнал, тогда как жесткие объекты с высокой плотностью возвращают более сильный сигнал.
Дисплей сонара покажет вам характеристики дна, с помощью яркости: чем ярче цвет, тем сильнее сигнал и, следовательно, тверже объект. Это особенно важно при сканировании дна.
Вы можете заметить, что низ дисплея становится толще и интенсивнее в некоторых местах (жесткое дно), затем тоньше и слабее в других (мягкое дно). Вы также можете заметить повторные возвратные сигналы сонара со дна. Здесь дно такое твердое, что луч сонара отразился на поверхности, снова отскочил, отразился снизу и был подхвачен вашим сонаром.
Пример второго дна
Почему это играет роль при …
Умение анализировать однородность дна заключается в освоении принципов работы с исходными данными. Потратив некоторое время на обучение, вы сэкономите много времени в дальнейшем, потому что всегда будете понимать обстановку под водой.
Совет от Deeper: Для улучшения навыков важно сместить приоритет от знания («Я знаю, где рыба») к пониманию («Я понимаю, почему рыба именно здесь»). Важно уметь уловить связь между показателями плотности дна, отображаемыми эхолотом, и обычным местоположением рыбы. Например, вы можете заметить, что при определенных условиях или в определенное время года интересующий вас вид рыбы всегда находится в местах с мягким дном. Это важное наблюдение поможет вам значительно повысить улов.
определении структуры и особенностей
Данные о твердости дна очень полезны как часть общей картины, которую вы создаете. Говоря о различии между сваями и камнями, глинистым и твердым дном, очень важно найти правильные места для рыбалки на ваши целевые виды рыбы.
Совет от Deeper: После того, как вы нашли интересное место, используйте узкий луч сонара, чтобы получить наиболее подробные и точные показания твердости дна. Убедитесь, что вы используете подробный, а не основной дисплей в приложении Fish Deeper (используйте меню с левой стороны для выбора), чтобы увидеть показания твердости дна.
Устройство и основные принципы работы эхолота
Люди занимаются рыболовством уже тысячи лет. Перед всеми, кто удит рыбу, стоит одна и та же задача – найти рыбу и сделать так, чтобы она клюнула на наживку. Эхолот, конечно, рыбу за вас не поймает, зато поможет ее найти.
Эхолот по-английски «sonar». Этот термин является сокращением от словосочетания «SOund» (звук), «NAvigation» (навигация) and Ranging (определение расстояния)». Эхолоты были созданы как средство слежения за субмаринами во время Второй мировой войны. Эхолот состоит из передатчика, преобразователя, приемника и экрана.
Вкратце работу эхолота можно описать так. Электрический импульс от передатчика преобразуется преобразователем в звуковую волну и посылается в воду. Если эта волна ударяется о какой-то предмет, она отражается. Эхо попадает в преобразователь, который преобразует его обратно в электрический сигнал, усиливаемый приемником и подаваемый на экран. Поскольку скорость звука в воде является величиной постоянной (около 1,575 км/сек), то, замерив промежуток времени между передачей сигнала и получением эхо, можно вычислить расстояние до предмета. Этот процесс повторяется много раз в секунду.
Наиболее часто в эхолотах используется частота 192-200 кГц, однако в некоторых моделях применяется частота 50 кГц. Хотя эти частоты находятся в пределах звукового спектра, ни человек, ни рыба их не ощущают (поэтому не волнуйтесь, что эхолот вспугнет вам рыбу – она его просто не услышит).
Как сказано выше, эхолот посылает и принимает сигналы, затем «отражает» эхо на экране. Поскольку это происходит много раз в секунду, на экране эхо представляется в виде непрерывной линии, отображающей сигнал, поступающий со дна. Помимо него, на экране отображаются эхосигналы от всех встретившихся ну пути объектов между поверхностью воды и дном. Зная скорость прохождения звука в воде (около 1,575 км/сек) и время, требующееся для приема эхо, прибор может вычислить глубину воды и определить наличие в ней рыбы.
Работа системы в целом
Высококачественный эхолот состоит из четырех базовых компонентов:
• мощного передатчика;
• эффективного преобразователя;
• чувствительного приемника;
• экрана с высоким разрешением и контрастностью.
Все части системы должны быть сконструированы в расчете на совместную эксплуатацию при любых погодных условиях и экстремальных температурах. Высокая мощность передатчика увеличивает вероятность того, что вы получите ответное эхо в глубокой воде и при плохой погоде. Она позволит вам различить мелкие детали, например, мелкую рыбешку и подводные предметы.
Преобразователь должен не только справляться с высокой нагрузкой от передатчика, но и преобразовывать электрическую энергию в звуковую с минимальными потерями в силе сигнала. С другой стороны, преобразователь обязан «слышать» слабейшие эхо, отражающиеся от глубин и мельчайшей рыбешки.
Приемнику также приходится иметь дело с очень широким диапазоном сигналов. Он ослабляет слишком сильный сигнал от передатчика и усиливает слабые сигналы, поступающие от преобразователя. Кроме того, он различает оказывающиеся слишком близко к друг другу объекты и показывает их в виде индивидуальных импульсов на экране.
Экран должен иметь высокое разрешение (вертикальные пиксели) и высокую контрастность, чтобы картинка на нем была четкой и детальной (например, чтобы можно было различать дугообразные сигналы от рыб и разные мелкие объекты).
В большинстве эхолотов в настоящее время используется частота 192-200кГц, и лишь некоторые работают на частоте 50 кГц.
У каждой из этих частот есть свои преимущества, однако почти во всех случаях в пресной воде и в большинстве случаев в соленой воде используют диапазон от 192 до 200 кГц. Он обеспечивает наивысшую детальность, лучше всего работает в мелководье и когда судно на ходу, дает меньше шумов и лишних эхо. Кроме того, на более высоких частотах выше разрешение объекта. Например, две плывущие рядом рыбины будут отображены на экране как два отдельных объекта, а не как одно сплошное «пятно».
В некоторых случаях оптимальной является частота 50 кГц. Как правило, эхолот с рабочей частотой 50 кГц (при равных условиях и мощности) способен проникать на бóльшие глубины, нежели эхолоты, работающие на более высоких частотах. Это связано с естественной способностью воды поглощать звуковые волны. Звуки более высокой частоты поглощаются быстрее, чем звуки более низкой частоты. Поэтому в более глубоких водах обычно применяются преобразователи 50 кГц. Кроме того, у преобразователей, работающих на 50 кГц, как правило, шире угол охвата, чем у их «коллег», работающих на 192 и 200 кГц. Благодаря этой особенности их удобно применять для слежения за составными даунриггерами, даже на относительном мелководье, поэтому многие рыбаки предпочитают частоту 50 кГц.
Предлагаем вашему вниманию сводную таблицу различий между эхолотами, работающими на указанных выше частотах:
192 и 200 кГц
• меньшие глубины
• узкий угол излучения
• лучше разрешение и различение цели
• меньшая восприимчивость к шумам
50 кГц
• бóльшие глубины
• широкий угол излучения
• хуже разрешение и различение цели
• более высокая восприимчивость к шумам
Преобразователь выполняет функцию антенны эхолота. Он преобразует электроэнергию от передатчика в звуковой сигнал высокой частоты. Звуковая волна от преобразователя проходит сквозь воду и отражается от находящегося в воде объекта. Когда до преобразователя докатывается ответное эхо, он преобразует звук обратно в электрический сигнал, который посылается на приемник эхолота. Частота преобразователя должна совпадать с частотой эхолота. Другими словами, нельзя использовать преобразователь 50 кГц и даже 200 кГц вместе с эхолотом, рассчитанным на 192 кГц. Преобразователь должен выдерживать мощные импульсы передатчика, преобразовывая как можно большую часть импульса в звуковую энергию. В то же время, он должен быть достаточно чувствительным, чтобы принимать тишайшие эхо. Все это должно происходить на нужной частоте, а эхо на других частотах должны отбрасываться. В общем, преобразователь должен быть очень умелым.
В качестве активного элемента в преобразователе используется искусственный кристал (цирконат свинца или титанат бария). В процессе изготовления химические вещества смешивают и заливают в формы, которые ставят в печь, где химические компоненты превращаются в отвердевшие кристаллы. После охлаждения на обе стороны кристалла наносится проводящее покрытие. К нему привариваются проводки, чтобы кристаллы можно было подсоединить к кабелю преобразователя. От формы кристалла зависит и его частота, и угол его излучения. У круглых кристаллов (используемых в большинстве эхолотов) частота зависит от толщины кристалла, а от его диаметра зависит угол излучения или угол охвата (см. раздел, «Углы излучения»). Например, при частоте 192 кГц кристалл с углом излучения 20° имеет диаметр примерно 2,5см, в то время как для излучения 8° требуется кристалл диаметром приблизительно 5,1см. Все логично. Чем больше диаметр кристалла, тем меньше угол излучения. Именно поэтому преобразователь с углом излучения 20° намного меньше преобразователя с углом излучения 8°, при одинаковой рабочей частоте.
Корпуса преобразователей бывают любых форм и размеров. Большинство из них изготавливаются из пластика, однако некоторые из преобразователей, рассчитанных на монтаж в корпус судна, изготавливаются из бронзы. Как мы уже говорили, размер кристалла определяет частоту и угол излучения. В свою очередь, размеры корпуса преобразователя зависят от размеров расположенного в нем кристалла.
В настоящее время существует четыре основных типа корпуса преобразователя. Это [1] сквозные корпуса (монтируются сквозь корпус судна), [2] корпуса, прикрепляемые к внутренней стенке корпуса судна, [3] переносные и [4] монтируемые на транце.
Преобразователи со сквозным корпусом вставляются в отверстие, просверленное в корпусе судна. Как правило, они снабжены длинным штоком, который пропускают сквозь корпус и закрепляют гайкой соответствующего размера. У плоскодонок монтаж этим и ограничивается. Для вертикальной установки преобразователя по борту судна, имеющего корпус V-образной формы, понадобится деревянный или пластмассовый обтекатель. Сквозные преобразователи обычно устанавливают на судах со стационарным двигателем, впереди рулей, гребных винтов и валов.
Преобразователи с корпусами второго типа приклеиваются эпоксидной смолой непосредственно к внутренней стенке стекловолоконного корпуса судна. Звук передается и принимается сквозь корпус судна, при этом работа эхолота становится менее эффективной (глубина действия эхолота будет ниже, чем у эхолота, установленного на транце). Корпус судна должен быть выполнен из твердого стекловолокна. Даже не пытайтесь «пробить» лучами эхолота корпус из алюминия, дерева или стали. Звук не проходит сквозь воздух, поэтому если корпус судна изнутри укреплен конструкцией из дерева, металла или пенопласта, перед установкой эхолота ее придется демонтировать. Еще один недостаток эхолота данного типа заключается в том, что его нельзя оптимально настроить на дугообразные сигналы рыб. Впрочем, наряду с недостатками есть и существенные преимущества. Во-первых, его не поломает корягой или камнем, т.к. он расположен внутри судна. Во-вторых, он, не выступая из корпуса судна и не препятствуя течению, и будучи установлен там, где поток воды плавно обтекает корпус, довольно хорошо, как правило, работает при больших скоростях хода судна. В третьих, он не обрастет.
Переносные преобразователи, как видно из их названия, крепятся к корпусу судна временно. Обычно их крепят при помощи одной или несколько присосок. Некоторые переносные преобразователи могут крепиться и к электродвигателю для троллинга.
Транцевые преобразователи крепятся на транце судна и находятся в воде, немного ниже днища судна. Среди перечисленных выше четырех типов транцевые преобразователи по популярности лидируют с большим отрывом. Транцевый преобразователь с тщательно продуманной конструкцией будет работать на любом судне (кроме судов со стационарным двигателем), в том числе при высокой скорости хода судна.
Эксплуатация преобразователя на скорости
Годы назад, когда эхолоты для спортивного рыболовства только появились, бóльшая часть рыбачьих судов представляла собой мелкие лодки с подвесными моторами. По-настоящему мощный подвесной мотор развивал 50 л.с., при этом уже тогда большинство эхолотов были переносными, и их было несложно переставлять с лодки на лодку. Это преимущество считалось важнее способности работать на высокой скорости. Тем не менее, по мере совершенствования лодок, все больше людей хотели иметь на борту стационарный эхолот, способный действовать на скоростях, развиваемых лодкой. В связи с этим началась работа над созданием преобразователя, нормально функционирующего независимо от скорости судна.
Серьезным препятствием для работы эхолота на высоких скоростях является кавитация. Если поток воды вокруг преобразователя равномерен, преобразователь без проблем посылает и принимает сигналы. Если же поток воды «вздыбливается» под воздействием непогоды или кромок судна, он становится турбулентным настолько, что воздух отделяется от воды в виде пузырьков. Это явление называется кавитацией. Если над преобразователем (в котором расположен кристалл) проносятся пузырьки воздуха, на экране эхолота отображается «шум». Дело в том, что эхолот предназначен для работы в воде, а не в воздухе. Если же над преобразователем проносятся пузырьки воздуха, сигнал преобразователя отражается от пузырьков обратно на преобразователь. Поскольку воздух граничит с преобразователем, эти отражения очень сильны. Они создают помеху более сильным сигналам, отражающимся от дна, подводных объектов, рыб, из-за чего их становится трудно или невозможно различить.
Для решения данной проблемы преобразователю нужен корпус, который вода бы обтекала, не создавая турбулентности. Это достаточно сложно из-за множества требований, предъявляемых к современному преобразователю. Он должен быть компактным, чтобы не мешать подвесному мотору и не препятствовать потоку воды за ним. Он должен быть прост в установке на транце, чтобы при монтаже можно было обойтись минимумом отверстий. Он должен «уметь» откидываться, чтобы избегать повреждений при столкновении с какими-либо предметами.
Проблема кавитации не ограничивается формой преобразователя. Корпуса многих судов сами способствуют образованию пузырьков воздуха, которые создают завесу над лицевой частью установленного на транце преобразователя. Эта проблема особенно актуальна для алюминиевых лодок, из-за сотен выступающих из корпуса заклепок, каждая из которых образует свой собственный поток пузырьков, особенно при движении лодки на высокой скорости. Во избежание этой проблемы нужно установить лицевую часть преобразователь таким образом, чтобы поток пузырьков воздуха проходил над ней. Иными словами, кронштейн преобразователя необходимо установить как можно ниже по транцу.
Углы излучения преобразователя
Преобразователь фокусирует звук в луч. Чем дальше вглубь идет звуковой импульс, испускаемый излучателем, тем шире его охват. Если бы вы изобразили его на листе миллиметровки, вы бы увидели, что он образует конус, поэтому угол излучения еще называют углом конуса. Звуковой сигнал наиболее силен вдоль центровой линии (оси) конуса, постепенно ослабевая по мере удаления от центра.
Чтобы измерить угол излучения преобразователя, мощность излучения замеряют в центре или на оси конуса, затем сравнивают с мощностью по мере удаления от центра. Когда мощность падает наполовину (-3 дБ), измеряют угол относительно оси. Угол в диапазоне от –3дБ с одной стороны оси до –3 дБ с другой стороны оси называют углом излучения (конуса).
Отметка половинной мощности –3 дБ считается стандартной в электронной промышленности, и большинство производителей измеряют угол излучения именно таким образом, хотя некоторые берут за основу отметку –10 дБ, где мощность излучения составляет 1/10 от мощности, имеющей место на оси. Угол получается более широким, поскольку замер производится в точке, расположенной гораздо дальше от оси. Эффективность работы преобразователя остается прежней, немного отличается лишь метод измерения. К примеру, на отметке – 3 дБ угол излучения преобразователя составляет 8°, а на отметке –10 дБ он составляет 16°.
Устройства с более широким лучом помогут вам увидеть более широкую картину подводного мира, но за счет уменьшения глубины проникновения луча, поскольку мощность передатчика направляется вширь, а не вглубь. Узкоугольный преобразователь не даст вам такого полного представления о том, что творится вокруг, как широкоугольный, однако позволит вам заглянуть значительно глубже. Дело в том, что узконаправленный преобразователь концентрирует мощь передатчика на меньшем участке. У эхолота с широкоугольным преобразователем сигнал, отражающийся от дна, на экране шире, чем у эхолота с узкоугольным преобразователем, поскольку вы наблюдаете более широкий участок дна. Зона охвата широкого угла излучения намного больше, чем зона охвата узкого угла излучения.
Высокочастотные преобразователи (192 кГц) бывают как узкоугольными, так и широкоугольными. В пресной воде, как правило, используются «широкоугольники», тогда как для соленой воды подходят только узкоугольные эхолоты. У низкочастотных эхолотов (50 кГц) широта угла излучения варьируется от 30 до 45 градусов. Хотя преобразователь наиболее чувствителен в пределах собственного угла излучения, до вас будут доходить и некоторые эхосигналы из-за этих пределов, правда, не такие сильные.
Состояние воды и дна
От типа воды, в которой эксплуатируется эхолот, в немалой степени зависит его эффективность. Звуковые волны легко перемещаются в прозрачной пресной воде, и в большинстве озер так и происходит.
В соленой воде звук поглощается и отражается взвешенными веществами. Наиболее восприимчивыми к рассеиванию звуковых волн оказываются более высокие частоты, которые не в состоянии проходить сквозь соленую воду так же хорошо, как более низкие. Отчасти, проблема эксплуатации в соленой воде состоит в том, что это крайне динамичная среда (фактически, мировой океан). Ветер и течения постоянно перемешивают в ней воду. Под действием волн в воде образуются и перемешиваются пузырьки воздуха, рассеивающие сигнал эхолота. Микроорганизмы, типа водорослей и планктона, рассеивают и поглощают сигнал эхолота. То же самое делают и находящиеся в воде минеральные вещества и соли. На пресную воду тоже воздействуют ветры, течения и живущие в ней микроорганизмы, но все таки меньше, чем на соленую.
Ил, песок, растительность на дне поглощают и рассеивают сигнал эхолота, ослабляя ответное эхо. Камень, сланец, кораллы и другие твердые предметы хорошо отражают сигнал эхолота. Вы увидите разницу, взглянув на экран. Мягкое, илистое дно отображается на нем в виде тонкой линии, а твердое, каменистое дно отображается в виде широкой полосы.
Работу эхолота можно сравнить с поведением света от фонаря в темной комнате. Когда свет перемещается по комнате, он хорошо отражается от белых стен и ярких твердых предметов, однако если направить фонарь в покрытый темным ковром пол, отражение будет слабее, поскольку ковер поглощает свет, а шероховатая текстура рассеивает его, из-за чего к вам возвращается меньше света.
Температура воды и термоклины
Температура воды оказывает существенное влияние на жизнедеятельность рыб. Рыба хладнокровна, и температура ее тела всегда совпадает с температурой окружающей ее воды. Зимой в холодной воде обмен веществ рыбы замедляется. В этот период ей требуется примерно в четыре раза меньше пищи, чем летом. Большинство рыб не мечут икру, если температура воды не находится в каком-то довольно узком диапазоне. Встроенные во многие наши эхолоты датчики температуры поверхности воды помогают определить температуры верхних слоев воды, являющиеся наиболее благоприятными для метания икры различными породами рыб. К примеру, форель погибает в реках, вода в которых становится слишком теплой. Окунь и другие породы рыб в конце концов погибают, если скапливаются в озерах, вода в которых летом недостаточно прогревается. И хотя некоторые рыбы восприимчивы к перепаду температур меньше, чем другие, у каждой породы есть свой определенный температурный диапазон, в границах которого она пытается оставаться. Собирающуюся у поверхности воды рыбу на глубоких участках привлекает именно благоприятная для них температура. Мы полагаем, что там она чувствует себя наиболее комфортно.
В озерах температура в пространстве между поверхностью и дном редко бывает одинаковой. Как правило, за более теплым слоем воды следует более холодный. Граница между двумя слоями называется термоклином. Глубина и толщина термоклина могут меняться в зависимости от времени года и времени суток. В глубоких озерах может иметься два термоклина и более. Это существенно, поскольку многим породам промысловой рыбы нравится располагаться прямо в нем либо немного выше или ниже него. Часто мелкая рыбешка оказывается над термоклином, а более крупная промысловая рыба покоится в нем или чуть ниже. К счастью, на экране эхолота эта разница в температурах отражена. Чем значительнее разность температур, тем четче на экране виден термоклин.
Дугообразные сигналы рыб
Один из вопросов, которые нам задают наиболее часто, звучит так: «Как сделать так, чтобы на экране отображались дуги рыб?» Добиться этого совсем не сложно, требуется лишь некоторое внимание к нюансам, причем не только при настройке эхолота, но и при его монтаже.
Количество вертикальных пикселей, на которые выводится изображение, называется разрешением экрана. Чем больше вертикальных пикселей на экране эхолота, тем четче он будет отображать дугообразные сигналы рыб. В приведенной ниже таблице для двух экранов указаны размеры пикселей и отображаемые ими участки в диапазоне дальности от 0 до 50 футов.

Как видите, при работе эхолота в диапазоне дальности от 0 до 100 футов на одном пикселе экрана представлен больший объем воды, чем при работе в эхолота в диапазоне 0-10 футов. Скажем, если у экрана эхолота 100 вертикальных пикселей, а эхолот работает в режиме 0-100 футов, каждому пикселю соответствует глубина 12 дюймов (ок. 30 см). Рыба должна быть по-настоящему крупной, чтобы при таком диапазоне быть обозначенной на экране в виде дуги! Однако, если сделать изображение мельче, с помощью функции масштабирования расширив диапазон на 30 футов (к примеру, с 80 до 110 футов), каждому пикселю будет соответствовать 3,6 дюйма (ок. 9 см). Теперь, благодаря масштабированию, та же самая рыба обозначается на экране в виде дуги. Размер дуги зависит от размеров рыбы: мелкая будет обозначена маленькой дугой, более крупная – более внушительной дугой и т.д.
При пользовании эхолотом с экраном с небольшим количеством вертикальных пикселей на мелководье, рыба, плывущая у самого дна, обозначается отдельной прямой линией. Это связано со слишком маленьким для такой глубины количеством точек. На глубокой воде (где сигнал от рыбы до лодки проходит большой путь), при отображении на экране участка дна в радиусе 20-30 футов, рыбы изображаются в виде дуг, располагающихся возле дна или какого-нибудь объекта. Это связано с уменьшением размера пикселей в большем конусе.
Скорость обновления экрана
Скорость прокрутки или обновления экрана также влияет на то, как отображаются дуги рыб на экране. Чем выше скорость обновления, тем больше пикселей активируется по мере прохождения рыбы в конусе и тем выше качество изображения дуги. (Однако не устанавливайте слишком высокую скорость обновления экрана, так как дуги рыб получатся растянутыми; поэкспериментируйте, пока не выберете скорость, наиболее вам подходящую.)
Причиной недостаточно хорошего отображения дуг рыб на экране может быть неправильно выполненный монтаж преобразователя. Если он установлен на транце, его лицевая часть должна находиться в воде и быть направлена перпендикулярно вниз. Если преобразователь окажется не под прямым углом к воде, качественного отображения дугообразных сигналов рыб на экране вы не получите. Если дуга на экране загнута кверху, а не книзу, значит, передняя часть преобразователя слишком приподнята, и ее нужно опустить. Если на экране отображается лишь задняя половина дуги, значит, передняя часть преобразователя слишком опущена, и ее нужно приподнять.
И еще о дугах рыб
Самая мелкая рыбешка вообще может не отображаться в виде дуг. Из-за различных факторов состояния воды, таких, как сильные помехи от ее поверхности, термоклины и т.д., бывает, что и максимальной чувствительности эхолота недостаточно, чтобы на экране показались дуги рыб. Старайтесь установить максимальную чувствительность, но при этом следите, чтобы на экране не появлялось слишком много «мусора». Этот способ подходит для средних и больших глубин.
Стая рыб появляется на экране в виде множества различных образований и форм, в зависимости от того, какая часть стаи попала в зону излучения преобразователя. В условиях мелководья несколько плывущих рядом рыб отображаются в виде брусков, сложенных как попало. Там, где поглубже, каждая из рыб отображается на экране в соразмерно своим габаритам.
Почему именно дуги?
Рыбы обозначаются на экране дугами из-за соотношения между рыбой и углом излучения (конусом) преобразователя при прохождении судна над рыбой. Как только рыба пересекает линию конуса, на экране активируется пиксель. При прохождении судна над рыбой расстояние до нее сокращается, при этом глубина нахождения рыбы (расстояние по вертикали между судном и рыбой), отображаемая на экране, становится меньше (дуга идет вверх). Когда центр конуса оказывается непосредственно над рыбой, заканчивается формирование первой половины дуги. В этот момент рыба находится к судну ближе всего, сигнал усиливается, и дуга становится толще. По мере увеличения расстояния между судном и рыбой дуга на экране идет вниз и обрывается после того, как рыба выплывает из конуса (т.е. зоны излучения) эхолота.
Если рыба не проходит по прямо по центру конуса, дуга получается менее отчетливой. Поскольку рыба попадает в конус лишь на короткое время, эхосигналов меньше, а те, что все таки есть, слабее. Эта одна из причин, по которой в условиях мелководья эхолоту сложнее отображать на экране дуги рыб. Угол излучения оказывается слишком узок для того, чтобы сигнал успел приобрести форму дуги.
Помните, что для образования дуг судно и рыба должны двигаться относительно друг друга. На практике это, как правило, означает, что судно идет на тихом ходу. Если судно стоит на якоре или просто не двигается, дуги образовываться не будут, и рыбы, вплывающие в конус и выплывающие из конуса излучения эхолота отображаются на экране в виде простых горизонтальных линий.