Рекомендации по эксплуатации
Лабораторная работа №10
НАВИГАЦИОННЫЕ ЭХОЛОТЫ
1. Изучить принцип работы эхолота.
2. Изучить основные технические характеристики эхолотов НЭЛ-5 и НЭЛ-М3Б.
3. Составить отчет о работе.
Теоретические положения
Принцип работы эхолота
В настоящее время наиболее совершенными средствами измерения глубин являются эхолоты, которые обеспечивают полную автоматизацию промеров. Определение глубин с помощью эхолотов основано на измерении промежутка времени между моментом посылки ультразвукового сигнала по направлению ко дну и моментом возвращения отраженного от дна эхо-сигнала. По физической природе звук (ультразвук) представляет собой механические колебания частиц упругой среды, источником которых является помещенное в водную среду колеблющееся твердое тело. Колеблясь, источник звука вызывает периодическое сжатие и растяжение прилегающих слоев. Благодаря взаимодействию соседних элементов среды, упругие деформации передаются от одного участка к другому. В результате в водной среде образуются области сгущений и разряжений, которые последовательно удаляются от источника колебаний. Этот процесс называется распространением акустической волны.
Прием и излучение ультразвуковых сигналов у эхолотов производится акустическими антеннами. Основной частью ультразвуковых антенн являются электроакустические преобразователи (вибраторы), в которых происходит преобразование электрической энергии в механическую и наоборот. Поверхность вибратора находится в соприкосновении с водной средой. В режиме излучения сигнала под действием переменного магнитного или электрического поля поверхность вибратора приходит в состояние колебания, передаваемого водной среде. В режиме приема поверхность вибратора под действием отраженной звуковой волны начинает совершать механические колебания, преобразуемые в электрический сигнал. В настоящее время применяются акустические преобразователи, обладающие магнитострикционным или пьезоэлектрическим эффектом.
Явление изменения линейных размеров ферромагнитных тел (железо, никель, кобальт) при изменении напряженности пронизывающего их магнитного поля или изменение магнитного состояния этих тел вследствие их деформации под действием механических сил называется магнитострикцией.
Прямым магнитострикционным эффектом называется явление изменения линейных размеров ферромагнетиков при помещении их в переменное магнитное поле. Прямой эффект используется в передающих антеннах.
Изменение напряженности магнитного поля, создаваемого поляризованным (намагниченным) ферромагнетиком вследствие изменения его линейных размеров под действием внешних сил, называется обратным магнитострикционным эффектом. Обратный эффект используется в приемных антеннах.
Конструктивно магнитострикционный преобразователь представляет собой пакет никелевых пластин, который охватывает катушка (обмотка). В передающих антеннах для создания переменного магнитного поля в пакете пластин через катушку пропускают переменный ток. Находясь в переменном магнитном поле, предварительно намагниченные пластины изменяют свою длину с той же частотой, с которой меняется магнитное поле. Механические колебания вибратора передаются водной среде, что приводит к излучению ультразвукового сигнала.
В приемных антеннах с обмотки снимают электрический сигнал, наводимый переменным магнитным полем, возникающим при деформациях пакета пластин. Отразившийся от дна ультразвуковой сигнал воздействует на предварительно намагниченный пакет никелевых пластин и изменяет его продольные размеры. В результате механических колебаний вибратора возникает магнитное поле, которое наводит электрический импульс в охватывающей пакет обмотке.
Магнитострикционные антенны имеют КПД порядка 0,3—0,5 и удовлетворительно работают на частотах до 30 — 40 кГц.
Пакет вибратора-излучателя и вибратора-приемника располагают в одном водонепроницаемом корпусе – обтекателе забортного устройства. Забортное устройство снабжено приспособлением для крепления его к борту судна при выполнении промеров глубин. При этом обтекатель забортного устройства устанавливают параллельно поверхности воды. Его нижняя плоскость должна быть заглублена не менее чем на 0,3 м.
Действие пьезоэлектрических преобразователей основано на пьезоэффекте, которым обладают некоторые естественные и искусственные кристаллы. В настоящее время в качестве пьезоэлектрического материала используется керамика титаната бария или цирконата титаната свинца.
Прямым пьезоэлектрическим эффектом называется явление, состоящее в том, что при деформациях сжатия или растяжения поляризованного кристалла, на его поверхности появляются электрические заряды. Этот эффект используется в вибраторах-приемниках.
Обратный пьезоэлектрический эффект заключается в том, что кристалл, помещенный в электрическое поле, будет изменять свои линейные размеры с частотой изменения электрического поля. Это свойство используется в излучающих антеннах.
Поскольку пьезоэлектрические преобразователи обычно обладают и прямым и обратным пьезоэффектом, то у многих эхолотов для излучения и приема ультразвука используется одна и та же антенна.
Пьезоэлектрические антенны имеют КПД до 0,6—0,7 и позволяют преобразовывать колебания частотой до сотен килогерц.

Рабочая частота эхолота, длительность импульсов и их скважность выбираются с учетом измеряемой глубины, затухания акустических колебаний в воде, акустических шумов, создаваемых судном, диаграммы направленности вибраторов и их размеров. В эхолотах последних разработок используется импульсный способ возбуждения, обеспечивающий большую точность измерения малых глубин.
В целях безопасности мореплавания последние навигационные эхолоты включают устройство, сигнализирующее о выходе судна на заданную глубину.
Принцип определения глубины с помощью эхолота заключается в измерении промежутка времени Dt между посылкой ультразвукового импульса и приходом отраженного от дна эхо-сигнала. Считая скорость распространения ультразвука в воде C0 постоянной, глубина h определится по формуле: h = 0,5ct. Скорость распространения ультразвука при температуре воды 15º составляет ≈1465 м/с.
Структурная схема эхолота представлена на рис. 1. Блок управления БУ предназначен для включения, настройки, регулировки эхолота и контроля за его работой.

Рис. 1. Структурная схема эхолота
Блок питания БП служит для преобразования постоянного тока источника питания ИП (аккумулятор или судовая сеть) в переменный ток с последующим его выпрямлением в постоянные токи различных напряжений для питания электрических цепей эхолота.
Генератор Г вырабатывает электрические импульсы заданной частоты и подает их на электроакустический преобразователь (вибратор-излучатель ВИ), который излучает ультразвуковой сигнал в водную среду.
Отраженный от дна эхо-сигнал поступает на вибратор-приемник ВП, где преобразуется в электрический сигнал, который после усиления в усилителе У поступает на индикатор И. Индикатор И принимает сигналы, фиксирует их и управляет посылкой следующих импульсов генератором.
По способу определения промежутка времени Δt эхолоты подразделяются на приборы с электромеханической разверткой времени и с электронной разверткой времени. Существуют также комбинированные эхолоты, использующие оба принципа развертки времени.
Электромеханическая развертка времени реализуется в электромеханических самописцах. Электронная – в цифровых указателях глубин, использующих либо цифровой индикатор, либо электронный самописец (жидкокристаллический дисплей) с блоком памяти, либо их комбинацию.
Эхолот НЭЛ-5
Эхолот НЭЛ-5 позволяет измерять глубины от 1 до 2000 м при скорости хода до 20 уз, бортовой качке до 10° и килевой качке до 2°.
Время непрерывной работы 12 ч.
Электропитание осуществляется переменным однофазным током частотой 50 Гц, напряжением 127 В, потребляемая мощность не более 300 ВА.
При электропитании постоянным током напряжением 110 или 220В применяются преобразователи. Потребляемая мощность от сети постоянного тока не более 600 Вт.
В состав эхолота входят:
— фильтры постоянного и переменного тока;
— две кабельные коробки;
— переменное гасительное сопротивление.
Эхолот НЭЛ-М3Б
Эхолот НЭЛ-М3Б предназначен для измерения, индикации и регистрации глубин моря в навигационных целях.
Эхолот позволяет измерять глубины от 0,5 до 500 м (НЭЛ-М3Б) при скоростях хода до 40 уз, бортовой качке до 10°, килевой качке до 3°, уклоне дна до 15°.
Время непрерывной работы 60 ч.
Электропитание осуществляется переменным однофазным током частотой 50 Гц, напряжением 220/127 В или частотой 400 Гц, напряжением 220 В, потребляемая мощность не более 130 В·А.
При бортовой сети постоянного тока напряжением 220 В используется преобразователь, потребляемая мощность при этом не более 250 Вт.
В состав эхолотов входят:
— пульт управления цифрового указателя глубин (ЦУГ);
— прибор сигнализации глубины;
— электронная часть ЦУГ;

Рис. 2. Эхолот НЭЛ-М3Б
Эхолоты с электронной разверткой времени
Большинство современных эхолотов являются цифровыми с электронной разверткой времени (рис. 3).


Рис. 3. Цифровой эхолот:
а – преобразователь; б – крепление преобразователя к транцу промерного судна;
в – жидкокристаллический дисплей эхолота; г – полноэкранный режим представления диаграммы записи на экране дисплея
Электронная развертка времени осуществляется с помощью счетных импульсов, вырабатываемых генератором. Генератор запускающих импульсов вырабатывает импульсы запуска. Эти импульсы поступают в блок посылки и блок управления и индикации. Получив импульс запуска, блок посылки формирует мощный зондирующий импульс, поступающий в вибратор-излучатель (преобразователь). Одновременно, блок управления и индикации дает команду на обнуление счетчика и открывает электронный ключ, который пропускает счетные импульсы с генератора на счетчик.
Отраженный от дна эхо-сигнал приходит на вибратор-приемник (преобразователь) и после усиления поступает в блок управления и индикации. Блок управления закрывает электронный ключ, останавливает счетчик, который преобразует подсчитанные импульсы в цифровое значение текущей глубины, включает цифровой индикатор и подключает счетчик к входу графопостроителя. Графопостроитель отображает точку, соответствующую текущей глубине на жидкокристаллическом дисплее. Совокупность точек на дисплее образует профиль дна (рис.3, г, текущая глубина – 15,6 м).
До начала промеров глубин выполняют полевую подготовку эхолота, которая заключается в введении поправки на глубину погружения вибраторов и тарировании эхолота.
Поправку на глубину погружения вибраторов вводят с целью получения записи глубин не от нижней плоскости вибраторов, а непосредственно от поверхности воды. Определяют эту поправку при полной загрузке промерного судна по делениям на штанге забортного устройства или измерением расстояния от поверхности воды до нижней плоскости вибраторов. Эта поправка вводится соответствующей настройкой эхолота.
Тарирование эхолота заключается в проверке точности измерения глубин эхолотом. Обычно тарирование выполняют сличением показаний эхолота с показаниями наметки (лота). Для этого промерное судно устанавливают на якоре в месте наибольших глубин. Включают эхолот и измеряют глубину. Тут же тщательно измеряют глубину наметкой (лотом) под вибраторами и сравнивают с глубиной, измеренной эхолотом. В случае расхождения глубин вводят поправку в измеренные эхолотом глубины. У эхолотов с электромеханическим самописцем поправку обычно компенсируют регулировкой частоты вращения электродвигателя самописца, а у цифровых эхолотов ее вводят в измеренные глубины при обработке результатов промеров.
Погрешности эхолотов
Они возникают при отклонении действительной скорости распространения звука от расчетной. Скорость распространения звука в морской воде зависит от температуры, солености и гидростатического давления. При повышении температуры на 1° скорость уменьшается на 4 м/с, при увеличении солености на 1% возрастает на 1 м/с, при увеличении глубины на 10 м повышается на 0,2 м/с. Значение поправки к измеренной глубине Δh за счет отклонения действительной скорости звука oт расчетной:
где С0 — расчетная скорость звука; С — фактическая скорость звука.
Поправка Dh положительна, если С>С0, и отрицательна, если С
Работа эхолота НЭЛ-МЗБ по функциональной электрической схеме
Навигационные эхолоты типа НЭЛ-М имеют несколько модификаций: НЭЛ-М 1, НЭЛ-М2, НЭЛ-МЗА, НЭЛ-МЗБ, НЭЛ-М4. Каждая модель предназначена для установки на судах определенного класса. Эхолот НЭЛ-МЗА устанавливается на судах класса река — море, эхолот НЭЛ-М4 — на речных судах. Модели эхолотов типа НЭЛ-М обладают высокой степенью унификации, имеют ряд общих приборов, выполненных на одинаковой элементной базе, и отличаются комплектацией и основными эксплуатационно-техническими характеристиками.
Навигационный эхолот НЭЛ-МЗБ предназначен для измерения глубин с помощью ультразвука, записи, цифровой индикации измеренных глубин и сигнализации при выходе судна на заданную глубину.
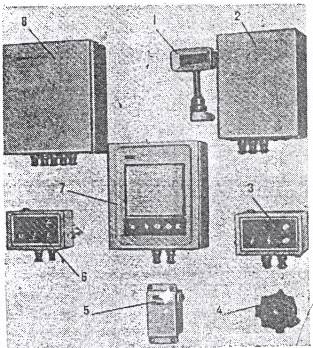
Рис. 1.2.3 Эхолот НЭЛ-МЗБ
Эхолот имеет следующие основные эксплуатационно-технические данные: диапазон измеряемых глубин 0,2-200 м; погрешности измерения глубин зависят от диапазона и составляют по самописцу от ±0,1 до ±3 м, по цифровому указателю глубин от ±0,1 до ±2 м, по прибору сигнализации глубин от +0,3 до ± 5 м; допустимая скорость судна 40 уз; допустимая килевая качка судна 2—3о, бортовая 10°; время готовности к работе 30 с; время непрерывной работы 60 ч; антенна пьезоэлектрического типа; расчетная скорость звука в воде 1500 м/с; питание эхолота от судовой сети однофазного тока напряжением 220/127 В, 50 Гц, от сети постоянного тока напряжением 220 В через преобразователь; потребляемая мощность от сети переменного тока 130 В*А, от сети постоянного тока 250 Вт.
В комплект эхолота (рис. 1.2.3) входят: антенна (прибор 1), самописец (прибор 4) 7, пульт управления цифрового указателя глубин ЦУГ (прибор 4Б) 3, прибор сигнализации глубин ПСГ (прибор 4Г) 6 с ревуном 4, цифровое табло (прибор 11) 1, приемопередающее устройство (прибор 16) 8, электронный узел ЦУГ (прибор 16А) 2, кабельная коробка (прибор Я), 5, ЗИП и техническая документация.
Рассмотрим принцип построения эхолота и его работы по функциональной электрической схеме (рис. 1.2.4). По характеру выполняемых задач электрическая схема эхолота НЭЛ-МЗА может быть условно разделена на следующие функциональные цепи: тракт формирования и посылки зондирующего импульса, тракт приема и усиления эхосигнала, тракт гашения и задержки нуля, тракт сигнализации заданной глубины, тракт управления работой двигателя, тракт преобразования времени и цифровой обработки измеренной глубины, схема контроля работы эхолота.
B тракт формирования и посылки зондирующего импульса входят: перо, контакты запуска КЗ и формирователь нулевой отметки ФНО прибора 4; генераторы автозапуска ГА приборов 4Б и 4Г схема ИЛИ и мультивибратор посылки МП блока посылок 1; генератор высокой частоты ГВЧ; коммутатор прием-передача КПП; прибор Я и антенна.
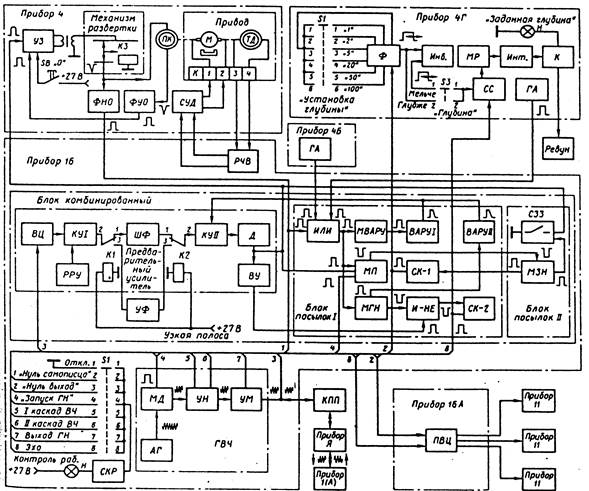
Рис. 1.2.4 Функциональная электрическая схема НЭЛ-МЗБ
При работающем самописце управление посылками осуществляется пером, контактом запуска КЗ и формирователем нулевой отметки, при отключенном самописце — генератором автозапуска прибора 4Б и при отключенных приборах 4 и 4Б — генератором автозапуска прибора 4Г. Импульс запуска в формирователе нулевой отметки задерживается на время, необходимое для прохождения пером расстояния от контакта запуска до нуля шкалы, и подается на схему ИЛИ блока посылок 1. На другие два входа схемы ИЛИ поступают импульсы запуска от генераторов автозапуска приборов 4Б и 4Г. С выхода схемы ИЛИ прямоугольные импульсы положительной полярности подаются на запуск мультивибратора посылки МП, мультивибратора гашения нуля МГН и мультивибратора временной автоматической регулировки усиления МВАРУ.
Мультивибратор посылки формирует прямоугольные импульсы посылки, длительность и частота следования которых зависят от поддиапазона измеряемых глубин и от включенного, для управления посылками прибора. Сформированные по длительности видеоимпульсы посылки подаются на модулятор МД генератора высокой частоты. На второй вход модулятора поступают высокочастотные гармонические колебания от автогенератора. После модулятора радио-импульсы усиливаются по напряжению и мощности и через коммутатор прием-передача подаются на антенну. В пьезоэлектрической антенне электрические колебания высокой частоты преобразуются в акустические колебания и излучаются в воду.
В тракт приема и усиления эхосигнала входят: антенна, прибор Я, коммутатор прием-передача, предварительный усилитель, усилитель записи УЗ, схемы ВАРУ.
Отраженный от дна акустический импульс принимается антенной и преобразуется в электрический сигнал. Электрический эхоимпульс во время пауз между зондирующими импульсами поступает через коммутатор прием-передача на вход предварительного усилителя. В предварительном усилителе эхосигнал усиливается двумя каскадами усиления КУ1 и КУ11, детектируется и подается в усилитель записи УЗ самописца, который обеспечивает усиления эхосигнала до значения, достаточного для прожига бумаги.
Защита приемоусилительного тракта от мощных зондирующих импульсов ГВЧ осуществляется коммутатором прием-передача. В КПП во время излучения импульсов шунтируется вход предварительного усилителя и на предварительный усилитель поступает ограниченный по интенсивности импульс. Этот радиоимпульс усиливается и поступает через детектор Д в усилитель записи самописца для записи «естественной» нулевой отметки.