- Airmar P66 User Manual
- Installation instructions owner’s guide, Transom-mount, Transducer or triducer
- Датчик эхолота airmar p66 инструкция
- Руководство по датчикам эхолота Airmar. Часть 3
- Руководство по датчикам эхолота Airmar. Часть 3. Способы монтажа датчиков эхолота
- Руководство по датчикам эхолота Airmar. Часть 1
- Руководство по датчикам эхолота Airmar. Часть 1.
- Принципы работы датчика эхолота
Airmar P66 User Manual
Installation instructions owner’s guide, Transom-mount, Transducer or triducer
max. no speed sensor
191mm (7-1/2″)
with Integral Release Bracket
Transducer or TRIDUCER
U. S. Patents: 5,606,253; 5,719,824
Safety goggles
Dust mask
Scissors
Masking tape
Electric drill
Drill bits:
Transom hole (optional)
Cable clamp holes
Angle finder
Marine sealant (suitable for below waterline)
Screwdrivers
Straight edge
Pencil
Grommet(s) (some installations)
Cable ties
Water-based anti-fouling paint (mandatory in salt water)
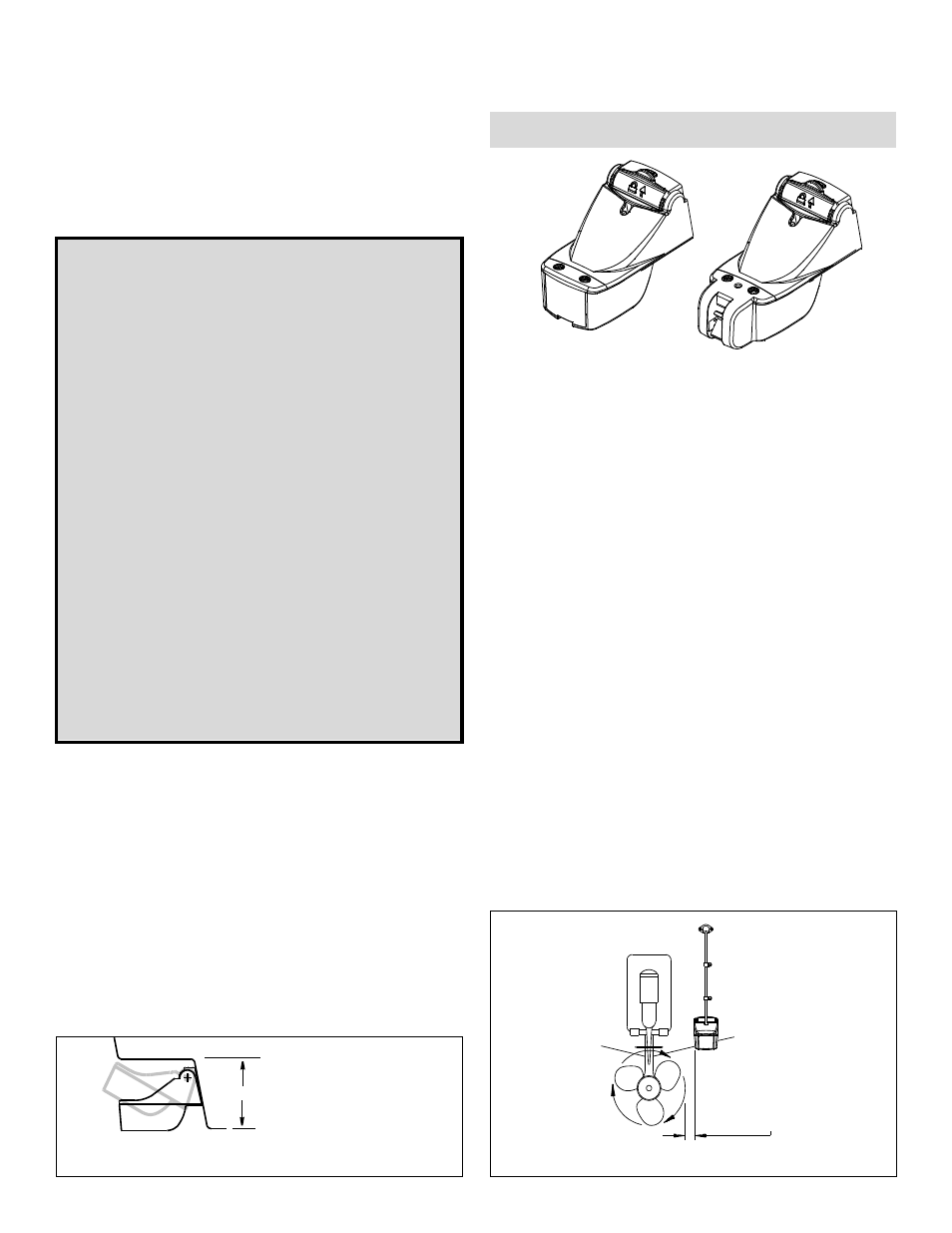
Figure 1. Stepped transom: headroom requirement
minimum 127mm (5″)
• Not recommended for boats with large inboard engine(s)
• Not recommended for stepped hull
• Good operation up to 44kn (50MPH)
• Vertically orients sound beam on hull with deadrise angle up to 30°
• Adjusts to transom angles from 2
• Bracket protects sensor from frontal impact only
CAUTION: Do not mount in line with or near water intake or
discharge openings or behind strakes, fittings, or hull irregularities
that will disturb the water flow.
CAUTION: Avoid mounting the sensor where the boat may be
supported during trailering, launching, hauling, or storage.
• For the best performance, the sensor must be in contact with
smooth water. To identify an area of clean water, observe the
water flow off the transom while the boat is underway.
• Allow space above the bracket for it to release and rotate the
sensor upward (see Figure 1).
• Mounting on the starboard side of the hull where the propeller
blades are moving downward is preferred.
• Mount the sensor as close to the centerline (keel) of the boat as
possible to ensure the sensor’s face remains in the water when
the boat is turning.
— Single drive boat—Mount at least 75mm (3″) beyond the swing
radius of the propeller (see Figure 2).
— Twin drive boat—Mount the sensor between the drives.
Figure 2. Mounting location on single drive boat
max. with speed sensor
213mm (8-1/2″)
Record the information found on the cable tag for future reference.
Copyright © 2003 Airmar Technology Corp.
Copyright © 2003 Airmar Technology Corp.
NOTE: Starboard
side of hull where
propeller blades are
moving downward is
preferred.
Follow the precautions below for optimal
product performance and to reduce the risk of
property damage, personal injury, and/or death.
WARNING: Always wear safety goggles and a dust
mask when installing.
WARNING: When the boat is placed in the water,
immediately check for leaks around the screws and
any other holes drilled in the hull.
CAUTION: Do not attach the sensor to the bracket
before fastening the bracket to the hull. It is VERY
difficult to separate them if the bracket is unattached.
CAUTION: Never pull, carry, or hold the transducer by
the cable as this may sever internal connections.
CAUTION: Never strike the multisensor with anything
except the palm of the hand. Never strike the
paddlewheel.
CAUTION: Never use solvents. Cleaner, fuel, sealant,
paint, and other products may contain solvents that can
damage plastic parts, especially the transducer’s face.
IMPORTANT: Please read the instructions completely
before proceeding with the installation. These
instructions supersede any other instructions in your
Датчик эхолота airmar p66 инструкция
Airmar P66 — транцевый датчик эхолота, выполненный в водонепроницаемом пластмассовом корпусе. В устройстве совмещены датчики скорости. Датчики эхолотов и трансдьюсеры. Airmar P66 датчик эхолота Пластиковый датчик эхолота.
Руководство по датчикам эхолота Airmar. Часть 3
Руководство по датчикам эхолота Airmar. Часть 3. Способы монтажа датчиков эхолота
Датчики с установкой в корпусе:

Преобразователь с установкой «в корпусе» — устанавливается внутри корпуса лодки против дна и посылает сигнал через корпус. Некоторые люди предпочитают этот тип монтажа, так как нет необходимости сверлить судно. Кроме того, датчик не может быть поврежден, когда лодка в движении, не подвержен воздействию морских организмов, нет никакого сопротивления воды, и преобразователь может быть установлен и обслуживаться в то время как судно находится на плаву. Большинство преобразователей в корпусе смонтированы в баке с жидкостью, который приклеен на месте.
Такой тип установки не рекомендуется для корпусов из металла, дерева и армированного стекловолокна, потому что будет слишком много потерь сигнала при прохождении через корпус.
Советы по монтажу датчика с установкой в корпусе:
- Закрепите там, где вода протекает по корпусу судна гладко с минимумом пузырьков и турбулентности (особенно на высоких скоростях).
- Убедитесь, что луч датчика не будет блокирован килем или винтом. Расстояние до киля должно быть не менее 300 мм.
- Не устанавливайте датчик вблизи забора воды или выпускных отверстий, ребер жесткости, фитингов, или неровностей корпуса.
- Используйте нетоксичный антифриз (пропиленгликоль), чтобы заполнить бак.
- При установке на водоизмещающий катер — разместите на 1/3 длинны ватерлинии со стороны носа и от 150 мм до 300 мм (6 «до 12») от центральной линии.
Читайте также:- платная рыбалка луховицы пруд
- как спаять тройник для рыбалки из 3 крючков
- самые уловистые силиконовые приманки 2020
- номер лодки на жилете
- катушки для фидера мифайн отзывы
- смазка для мультипликаторные катушки шимано отзывы
- когда ловить бычка в приморско-ахтарске
- мотовило круглое для донки три кита найти
- снасть из крышки от противогаза
- один на рыбалке in all f
- мушковичи смоленская область рыбалка
- как вязать крючок для рыбалки восьмеркой
Правая сторона корпуса где лопасти пропеллера движутся вниз, является предпочтительной.
- Правая сторона корпуса, где лопасти пропеллера движутся вниз, является предпочтительной.
- При установке на лодку со ступенчатым корпусом — монтируйте прямо перед первой ступенью.
- При установке на парусную лодку с плавниковым килем — монтируйте в стороне от центральной линии и впереди плавникового киля от 300 мм до 600 мм.
- При установке на парусную лодку с полным (длинным) килем — разместите посередине судна и подальше от киля в точке минимального угла падения.

Датчики с установкой сквозь корпус (врезные):
Преобразователи этого типа монтажа делятся на две категории. Они рекомендованы для небольших судов с минимальным углом килеватости. Такие датчики часто устанавливаются на парусных судах, так как производят минимальное лобовое сопротивление. Второй вариант: датчики выходят за пределы поверхности корпуса судна и требуется направить датчик так, чтобы луч шел вертикально. Будучи установленным впереди гребных винтов и ходовой части (где нет пузырьков и турбулентности), датчик производит наиболее эффективный возврат сигнала, так как ничто на судне не мешает активному преобразователю.
Такие датчики могут использоваться на моторных и парусных судах, они есть для каждого материала корпуса. Датчик устанавливаемый сквозь корпус не рекомендуется в двух случаях:
- Пластиковый датчик сквозь корпус не может быть использован в деревянной лодке. Древесина разбухает, поглощая воду, поэтому может треснуть корпус датчика.
- Бронзовый датчик сквозь корпус не может быть использован в алюминиевых лодках и лодках из нержавеющей стали. Взаимодействие между металлическим корпусом и бронзовым преобразователем, особенно в присутствии соленой воды, будет разъедать металлический корпус и / или бронзовый корпус.
Советы по монтажу датчика с установкой в корпусе (врезного):
- Монтируйте сквозь корпус, так чтобы датчик всегда находился под водой.
- Закрепите там, где вода протекает по поверхности преобразователя гладко с минимумом пузырьков и турбулентности (особенно на высоких скоростях).
- Убедитесь, что луч датчика не будет блокирован килем или винтом. Расстояние до киля должно быть не менее 300 мм.
- Не устанавливайте датчик вблизи забора воды или выпускных отверстий; или ребер жесткости, фитингов, или неровностей корпуса.
- При установке на водоизмещающий катер — разместите на 1/3 длинны ватерлинии со стороны носа и от 150 мм до 300 мм (6 «до 12») от центральной линии. Правая сторона корпуса где лопасти пропеллера движутся вниз, является предпочтительной.
- Правая сторона корпуса, где лопасти пропеллера движутся вниз, является предпочтительной.
- При установке на лодку со ступенчатым корпусом — монтируйте прямо перед первой ступенью.
- Для лодок способных развивать скорость выше 25 узлов (46 км в час) — проверьте местоположения датчика и операционные результаты аналогичных судов перед установкой.
- При установке на парусную лодку с плавниковым килем — монтируйте в стороне от центральной линии и впереди плавникового киля от 300 мм до 600 мм.
- При установке на парусную лодку с полным (длинным) килем — разместите посередине судна и подальше от киля в точке минимального угла падения.

Датчики с установкой на транец:

Этот способ монтажа означает крепление датчика на корму (транец) судна. Преимуществом такого способа является возможность легкой установки и демонтажа датчика, особенно если использовать съемную струбцину с датчиком. С помощью такой струбцины можно легко убрать датчик, чтобы не повредить его, например, при перевозке лодки на прицепе. Также, установка на транец дает лучшие результаты работы датчика, чем установка сквозь корпус, при скорости движения более 30 миль в час (48 км/ч).
Советы по монтажу датчиков с установкой на транец:
- Не устанавливайте датчик вблизи забора воды или выпускных отверстий; или ребер жесткости, фитингов, или неровностей корпуса.
- Не устанавливайте датчик в месте, на которое корпус судна может опираться при транспортировке или хранении.
- Для наиболее эффективной работы, датчик должен соприкасаться с ровной водой, без пузырьков и турбулентности
- Для наиболее эффективной работы, луч датчика должен быть направлен прямо в сторону дна. Поскольку на многих суднах транец не строго вертикален, компенсируйте это с помощью установочного кронштейна.
- Оставьте место над кроштейном, чтобы при необходимости (например, механическом воздействии препятствия) датчик мог подняться вверх и избежать повреждений.
- В случае установки на ступенчатый транец, монтируйте датчик на нижнюю ступеньку, однако оставьте место над кронштейном, чтобы датчик мог повернуться вверх при необходимости.
- Рекомендуется установка на сторону транца, где где лопасти винта движутся вниз.
- Устанавливайте датчик как можно ближе к центральной линии судна, но не менее чем в 15 см от радиуса лопастей двигателя.
Руководство по датчикам эхолота Airmar. Часть 1
Руководство по датчикам эхолота Airmar. Часть 1.
Принципы работы датчика эхолота
Что такое датчик?
Хороший эхолот зависит от эффективного преобразователя, передающего и принимающего сигналы. Преобразователь является сердцем системы эхолота. Это устройство, которое изменяет электрические импульсы в звуковые волны или акустическую энергию и обратно. Другими словами, это устройство посылает звуковые волны, а затем принимает эхо-сигналы, и эхолот интерпретирует или «обнаруживает», что находится ниже поверхности воды.

Как работает датчик?
Самый простой способ понять, как функционирует преобразователь, это представить его как прибор с динамиком и микрофоном. Преобразователь получает последовательность высоковольтных электрических импульсов от эхолота. Затем, как стереодинамики у вас дома, датчик преобразует импульсы в звук. Звук проходит через воду, как волны давления. Когда волна достигает таких объектов, как водоросли, камни, скалы, рыба или дно, волна отражается. Волна возвращается эхом — так же, как ваш голос будет отражаться эхом от стены каньона. Когда отраженная звуковая волна возвращается, датчик действует, как микрофон. Он принимает звуковую волну в течение времени между каждым импульсом передачи и преобразует его обратно в электрическую энергию. Преобразователь тратит около 1% своего времени для передачи и 99% своего времени спокойно слушая эхо-сигналы. Помните, однако, что эти периоды времени измеряются в микросекундах, поэтому время между импульсами очень короткое. Эхолот вычисляет разницу во времени между передающим импульсом и обратным эхом, а затем отображает эту информацию на экране, в понятном пользователю виде.

Что входит в Создание датчика?
Основным компонентом датчика глубины является пьезокерамический элемент. Это та часть, которая преобразует электрические импульсы в звуковые волны, а когда эхо возвращается, пьезокерамический элемент преобразует звуковые волны обратно в электрическую энергию. Пьезокерамические элементы наиболее часто выполнены в форме диска, но они также могут быть в форме стержня или кольца. Преобразователь может содержать один элемент или ряд элементов соединенных вместе (массив). Преобразователь состоит из шести отдельных компонентов:

Как датчик узнает глубину?
Эхолот измеряет время между передачей звука и приемом его эха. Звук проходит по воде со скоростью около 1463 м/с (4,800 футов/с), чуть менее мили в секунду. Для того, чтобы вычислить расстояние до объекта, эхолот умножает время, прошедшее между передачей звука и принятым эхом на скорость звука в воде. Система эхолота интерпретирует результат и отображает глубину воды для пользователя.

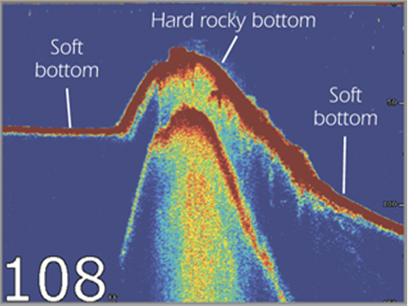
Откуда датчик знает, как выглядит дно?
Поскольку лодка движется по воде, отголоски некоторых звуковых волн возвращаются быстрее, чем другие. Мы знаем, что все звуковые волны движутся с одинаковой скоростью. Когда звуковая волна в одной секции звукового поля возвращается быстрее, чем другая, это означает, что волна отскочила от чего-то находящегося ближе к датчику. Эти возвращающиеся звуковые волны показывают все выпуклости и впадины на подводной поверхности — структуру дна. Эхолоты способны определить мягкое или жесткое дно, и даже различить заросли водорослей и камни, потому что звуковые волны отражаются от этих поверхностей по-разному.
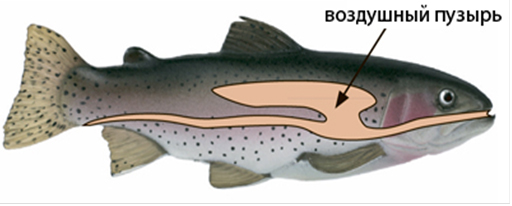
Как датчик определяет рыбу?
Датчик может обнаружить рыбу, так как он чувствует воздушный пузырь. Почти каждая рыба имеет орган — воздушный пузырь, заполненный газом, что позволяет рыбе легко приспособиться к давлению воды на разных глубинах. Количество газа в воздушном пузыре может быть увеличено или уменьшено, чтобы регулировать плавучесть рыбы. Поскольку воздушный пузырь содержит газ, он резко отличается плотностью, от плоти рыбы, а также воды, которая окружает ее. Из-за этой разницы в плотности, звуковые волны эхолота отскакивают от рыбы отчетливо. Преобразователь принимает эхо-сигналы и эхолот распознает эти различия. Затем эхолот отображает сигнал в виде рыбы.
Продолжение читайте в следующей статье.